 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDual approach for object tracking based on optical flow and swarm intelligence
Aug 15, 2018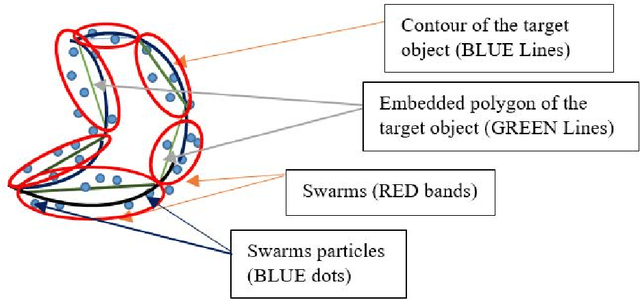
In Computer Vision,object tracking is a very old and complex problem.Though there are several existing algorithms for object tracking, still there are several challenges remain to be solved. For instance, variation of illumination of light, noise, occlusion, sudden start and stop of moving object, shading etc,make the object tracking a complex problem not only for dynamic background but also for static background. In this paper we propose a dual approach for object tracking based on optical flow and swarm Intelligence.The optical flow based KLT(Kanade-Lucas-Tomasi) tracker, tracks the dominant points of the target object from first frame to last frame of a video sequence;whereas swarm Intelligence based PSO (Particle Swarm Optimization) tracker simultaneously tracks the boundary information of the target object from second frame to last frame of the same video sequence.This dual function of tracking makes the trackers very much robust with respect to the above stated problems. The flexibility of our approach is that it can be successfully applicable in variable background as well as static background.We compare the performance of the proposed dual tracking algorithm with several benchmark datasets and obtain very competitive results in general and in most of the cases we obtained superior results using dual tracking algorithm. We also compare the performance of the proposed dual tracker with some existing PSO based algorithms for tracking and achieved better results.
A Modification of Particle Swarm Optimization using Random Walk
Feb 26, 2018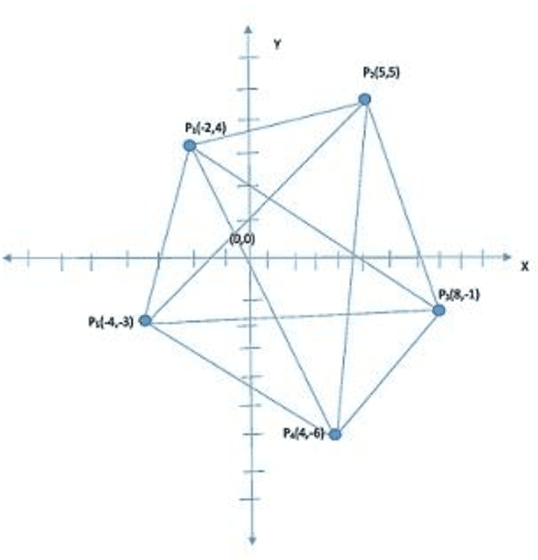
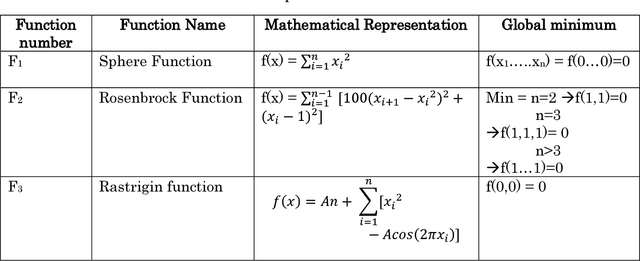
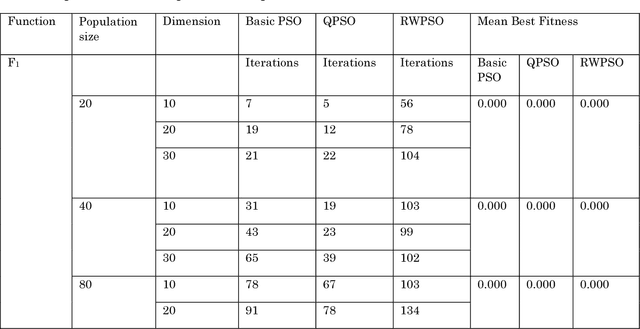
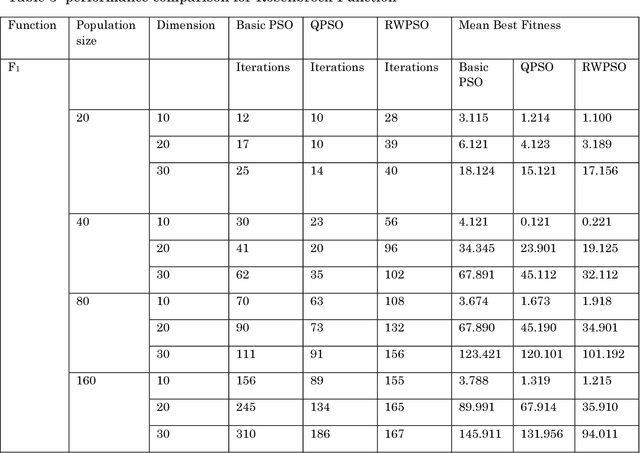
Particle swarm optimization comes under lot of changes after James Kennedy and Russell Eberhart first proposes the idea in 1995. The changes has been done mainly on Inertia parameters in velocity updating equation so that the convergence rate will be higher. We are proposing a novel approach where particles movement will not be depend on its velocity rather it will be decided by constrained biased random walk of particles. In random walk every particles movement based on two significant parameters, one is random process like toss of a coin and other is how much displacement a particle should have. In our approach we exploit this idea by performing a biased random operation and based on the outcome of that random operation, PSO particles choose the direction of the path and move non-uniformly into the solution space. This constrained, non-uniform movement helps the random walking particle to converge quicker then classical PSO. In our constrained biased random walking approach, we no longer needed velocity term (Vi), rather we introduce a new parameter (K) which is a probabilistic function. No global best particle (PGbest), local best particle (PLbest), Constriction parameter (W) are required rather we use a new term called Ptarg which is loosely influenced by PGbest.We test our algorithm on five different benchmark functions, and also compare its performance with classical PSO and Quantum Particle Swarm Optimization (QPSO).This new approach have been shown significantly better than basic PSO and sometime outperform QPSO in terms of convergence, search space, number of iterations.
Object Tracking based on Quantum Particle Swarm Optimization
May 24, 2017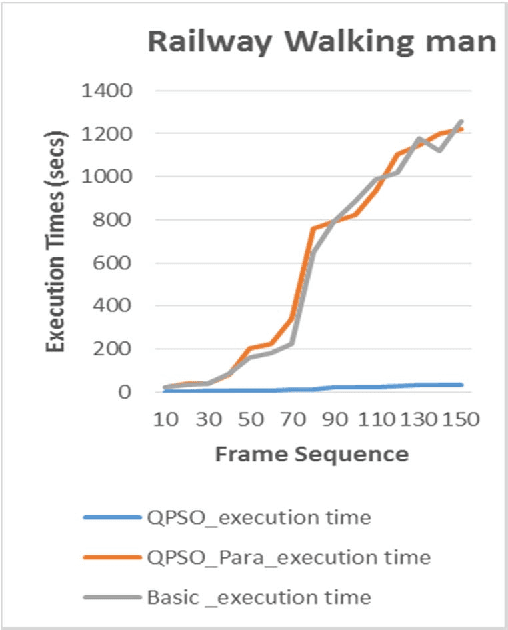
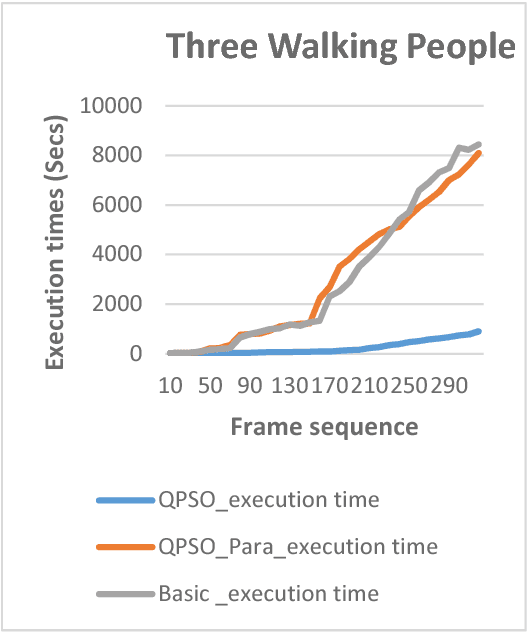
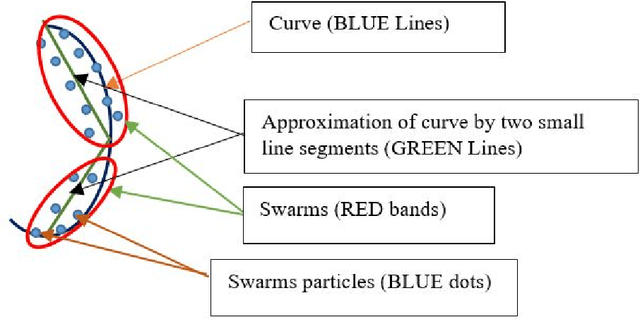
In Computer Vision domain, moving Object Tracking considered as one of the toughest problem.As there so many factors associated like illumination of light, noise, occlusion, sudden start and stop of moving object, shading which makes tracking even harder problem not only for dynamic background but also for static background.In this paper we present a new object tracking algorithm based on Dominant points on tracked object using Quantum particle swarm optimization (QPSO) which is a new different version of PSO based on Quantum theory. The novelty in our approach is that it can be successfully applicable in variable background as well as static background and application of quantum PSO makes the algorithm runs lot faster where other basic PSO algorithm failed to do so due to heavy computation.In our approach firstly dominants points of tracked objects detected, then a group of particles form a swarm are initialized randomly over the image search space and then start searching the curvature connected between two consecutive dominant points until they satisfy fitness criteria. Obviously it is a Multi-Swarm approach as there are multiple dominant points, as they moves, the curvature moves and the curvature movement is tracked by the swarm throughout the video and eventually when the swarm reaches optimal solution , a bounding box drawn based on particles final position.Experimental results demonstrate this proposed QPSO based method work efficiently and effectively in visual object tracking in both dynamic and static environments and run time shows that it runs closely 90% faster than basic PSO.in our approach we also apply parallelism using MatLab Parfor command to show how very less number of iteration and swarm size will enable us to successfully track object.