 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-Driven Dynamic Modeling of a Tendon-Actuated Continuum Robot
May 18, 2026Developing dynamic models for tendon-driven continuum robots is challenging due to their nonlinear, high-dimensional, and friction-dominated dynamics. This paper presents a comparative study of data-driven system identification methods, including N4SID, ARX, and SINDYc, for modeling a tendon-actuated continuum robot with rolling joints developed at CERN. Despite the high number of joints of the robot, experimental analysis reveals that a two-degree-of-freedom dynamic model can accurately capture the system dynamics, owing to strong kinematic dependencies between the joints. The models are validated against experimental data, and used in the design of a model predictive controller, demonstrating their feasibility for real-time control.
Tendon-Actuated Robots with a Tapered, Flexible Polymer Backbone: Design, Fabrication, and Modeling
Mar 19, 2026This paper presents the design, modeling, and fabrication of 3D-printed, tendon-actuated continuum robots featuring a flexible, tapered backbone constructed from thermoplastic polyurethane (TPU). Our scalable design incorporates an integrated electronics base housing that enables direct tendon tension control and sensing via actuators and compression load cells. Unlike many continuum robots that are single-purpose and costly, the proposed design prioritizes customizability, rapid assembly, and low cost while enabling high curvature and enhanced distal compliance through geometric tapering, thereby supporting a broad range of compliant robotic inspection and manipulation tasks. We develop a generalized forward kinetostatic model of the tapered backbone based on Cosserat rod theory using a Newtonian approach, extending existing tendon-actuated Cosserat rod formulations to explicitly account for spatially varying backbone cross-sectional geometry. The model captures the graded stiffness profile induced by the tapering and enables systematic exploration of the configuration space as a function of the geometric design parameters. Specifically, we analyze how the backbone taper angle influences the robot's configuration space and manipulability. The model is validated against motion capture data, achieving centimeter-level shape prediction accuracy after calibrating Young's modulus via a line search that minimizes modeling error. We further demonstrate teleoperated grasping using an endoscopic gripper routed along the continuum robot, mounted on a 6-DoF robotic arm. Parameterized iLogic/CAD scripts are provided for rapid geometry generation and scaling. The presented framework establishes a simple, rapid, and reproducible pathway from parametric design to controlled tendon actuation for tapered, tendon-driven continuum robots manufactured using fused deposition modeling 3D printers.
Safety-Critical Control of Nonholonomic Vehicles in Dynamic Environments using Velocity Obstacles
Oct 01, 2023



This paper considers collision avoidance for vehicles with first-order nonholonomic constraints maintaining nonzero forward speeds, moving within dynamic environments. We leverage the concept of control barrier functions (CBFs) to synthesize control inputs that prioritize safety, where the safety criteria are derived from the velocity obstacle principle. Existing instantiations of CBFs for collision avoidance, e.g., based on maintaining a minimal distance, can result in control inputs that make the vehicle stop or even reverse. The proposed formulation effectively separates speed control from steering, allowing the vehicle to maintain a forward motion without compromising safety. This is beneficial for ensuring that the vehicle advances towards its desired destination, and it is moreover an underlying requirement for certain vehicles such as marine vessels and fixed-wing UAVs. Theoretical safety guarantees are provided, and numerical simulations demonstrate the efficiency of the strategy in environments containing moving obstacles.
Task-Priority Control of Redundant Robotic Systems using Control Lyapunov and Control Barrier Function based Quadratic Programs
Jan 21, 2020
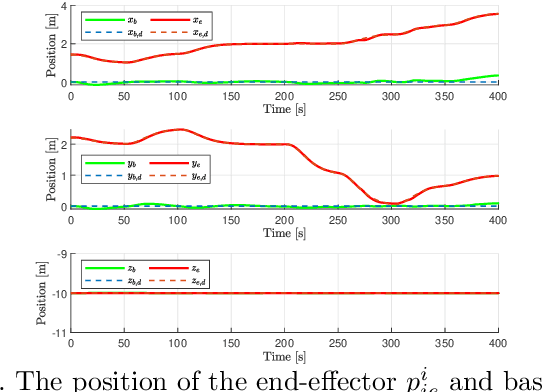
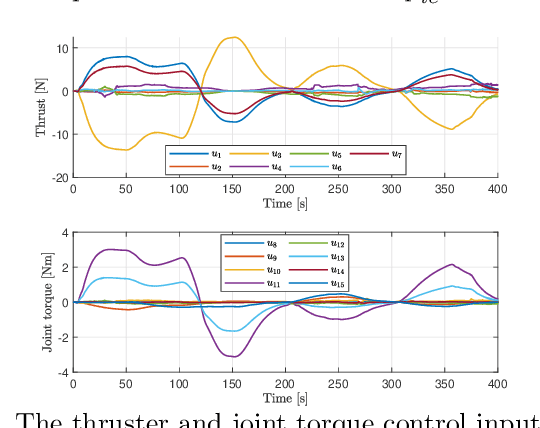
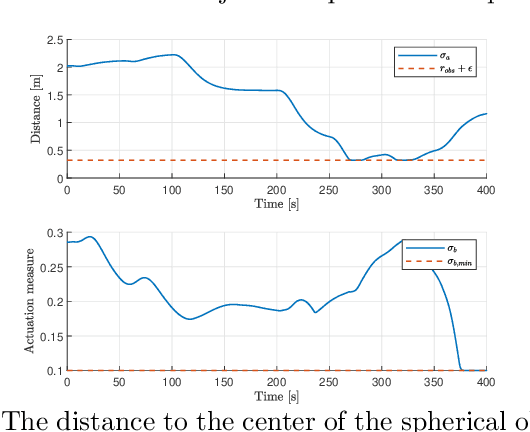
Redundant robotic systems are designed to accomplish multiple tasks simultaneously. Tasks are functions of the system configuration, and can be divided into groups by their priority. System redundancy can be exploited by including lower-priority optimization tasks within the control framework. However, it is important that the inclusion of such lower-priority tasks does not have an effect on higher-priority safety-related and operational tasks. This paper presents a novel task-priority framework based on a hierarchy of control Lyapunov function (CLF) and control barrier function (CBF) based quadratic programs (QPs). The proposed method guarantees strict priority among different groups of tasks such as safety-related, operational and optimization tasks. Moreover, a soft priority measure in the form of penalty parameters can be employed to prioritize tasks at the same priority level. As opposed to kinematic control schemes, the proposed framework is a holistic approach to control of redundant robotic systems, which solves the redundancy resolution, dynamic control and control allocation problems simultaneously. Simulation results of a hyper-redundant articulated intervention autonomous underwater vehicle (AIAUV) is presented to validate the proposed framework.