 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlexible Disaster Response of Tomorrow -- Final Presentation and Evaluation of the CENTAURO System
Sep 19, 2019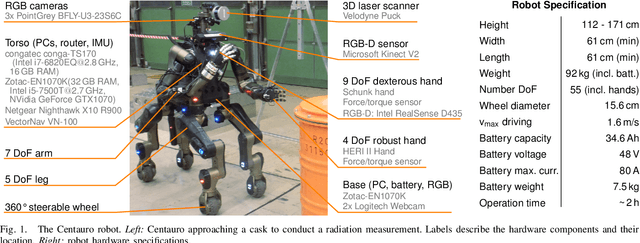
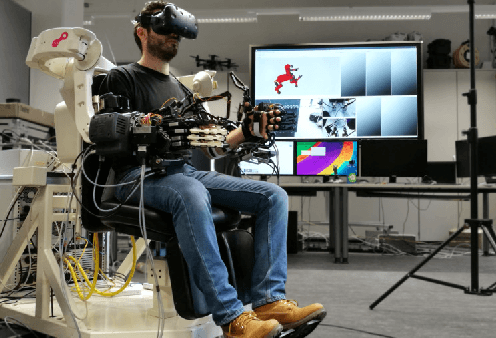
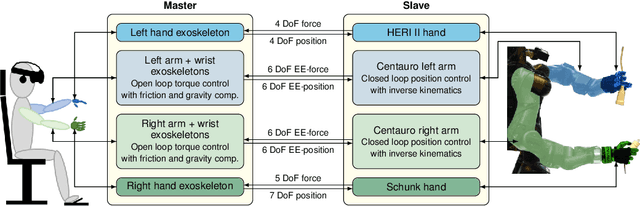
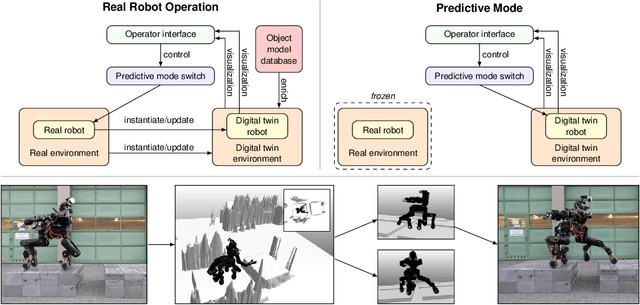
Mobile manipulation robots have high potential to support rescue forces in disaster-response missions. Despite the difficulties imposed by real-world scenarios, robots are promising to perform mission tasks from a safe distance. In the CENTAURO project, we developed a disaster-response system which consists of the highly flexible Centauro robot and suitable control interfaces including an immersive tele-presence suit and support-operator controls on different levels of autonomy. In this article, we give an overview of the final CENTAURO system. In particular, we explain several high-level design decisions and how those were derived from requirements and extensive experience of Kerntechnische Hilfsdienst GmbH, Karlsruhe, Germany (KHG). We focus on components which were recently integrated and report about a systematic evaluation which demonstrated system capabilities and revealed valuable insights.
Sparse motion segmentation using multiple six-point consistencies
Dec 13, 2010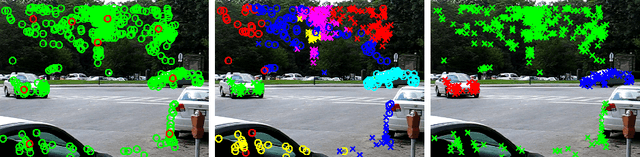
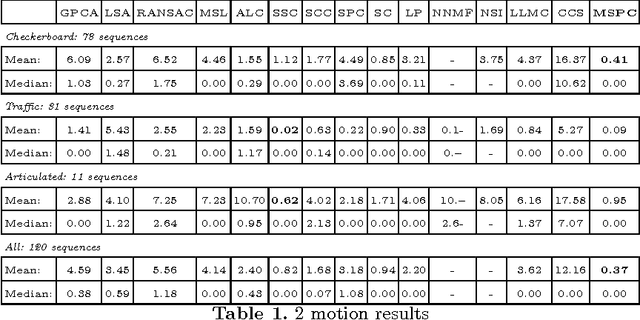
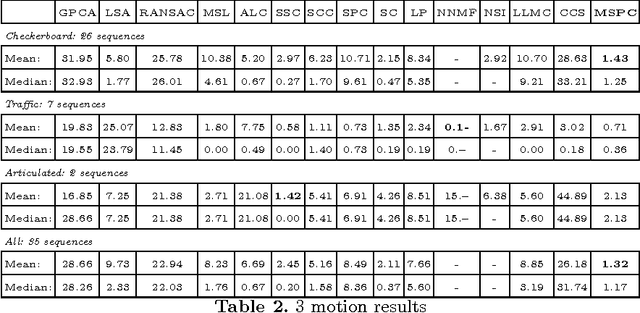
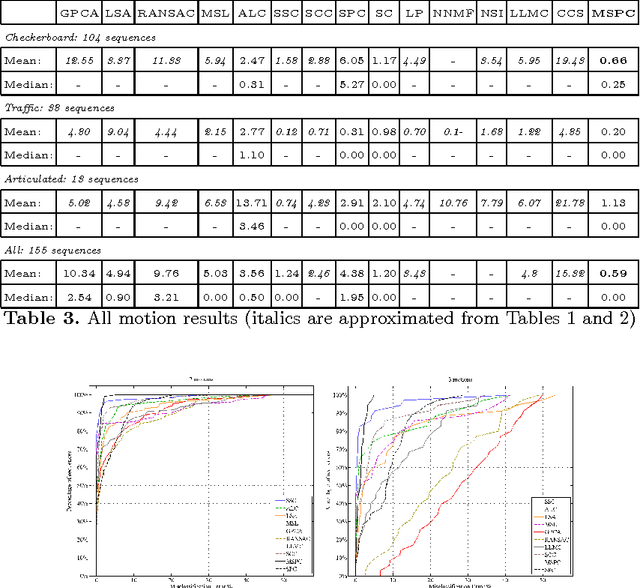
We present a method for segmenting an arbitrary number of moving objects in image sequences using the geometry of 6 points in 2D to infer motion consistency. The method has been evaluated on the Hopkins 155 database and surpasses current state-of-the-art methods such as SSC, both in terms of overall performance on two and three motions but also in terms of maximum errors. The method works by finding initial clusters in the spatial domain, and then classifying each remaining point as belonging to the cluster that minimizes a motion consistency score. In contrast to most other motion segmentation methods that are based on an affine camera model, the proposed method is fully projective.