 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDual-IMU State Estimation for Relative Localization of Two Mobile Agents
Mar 06, 2024In this paper, we address the problem of relative localization of two mobile agents. Specifically, we consider the Dual-IMU system, where each agent is equipped with one IMU, and employs relative pose observations between them. Previous works, however, typically assumed known ego motion and ignored biases of the IMUs. Instead, we study the most general case of unknown biases for both IMUs. Besides the derivation of dynamic model equations of the proposed system, we focus on the observability analysis, for the observability under general motion and the unobservable directions arising from various special motions. Through numerical simulations, we validate our key observability findings and examine their impact on the estimation accuracy and consistency. Finally, the system is implemented to achieve effective relative localization of an HMD with respect to a vehicle moving in the real world.
RISE-SLAM: A Resource-aware Inverse Schmidt Estimator for SLAM
Nov 23, 2020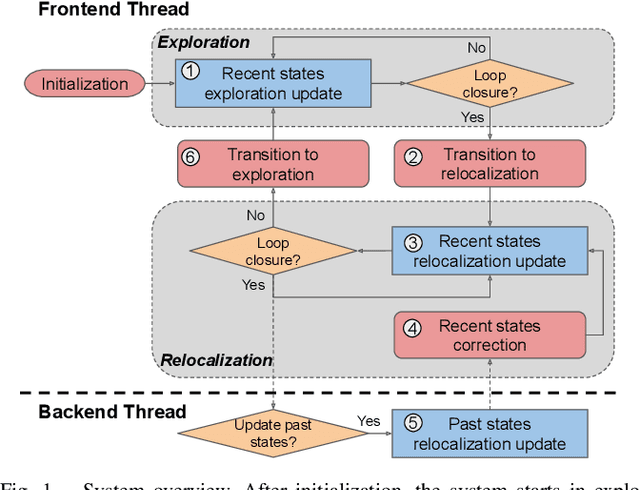
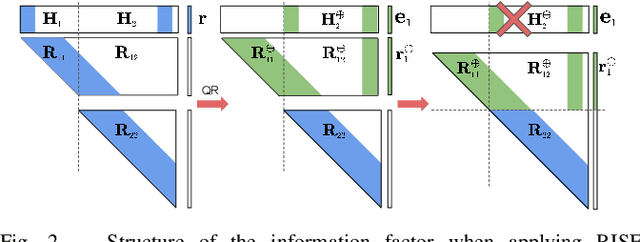
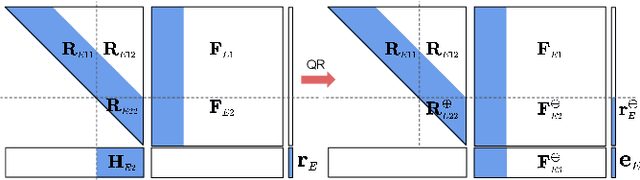
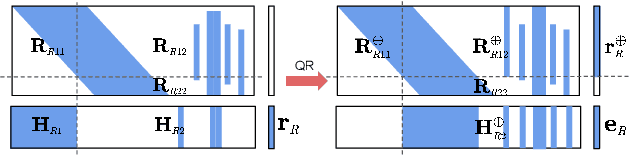
In this paper, we present the RISE-SLAM algorithm for performing visual-inertial simultaneous localization and mapping (SLAM), while improving estimation consistency. Specifically, in order to achieve real-time operation, existing approaches often assume previously-estimated states to be perfectly known, which leads to inconsistent estimates. Instead, based on the idea of the Schmidt-Kalman filter, which has processing cost linear in the size of the state vector but quadratic memory requirements, we derive a new consistent approximate method in the information domain, which has linear memory requirements and adjustable (constant to linear) processing cost. In particular, this method, the resource-aware inverse Schmidt estimator (RISE), allows trading estimation accuracy for computational efficiency. Furthermore, and in order to better address the requirements of a SLAM system during an exploration vs. a relocalization phase, we employ different configurations of RISE (in terms of the number and order of states updated) to maximize accuracy while preserving efficiency. Lastly, we evaluate the proposed RISE-SLAM algorithm on publicly-available datasets and demonstrate its superiority, both in terms of accuracy and efficiency, as compared to alternative visual-inertial SLAM systems.