 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Distributed Planar Formation Control for Higher-Order Holonomic and Nonholonomic Agents
Jul 29, 2018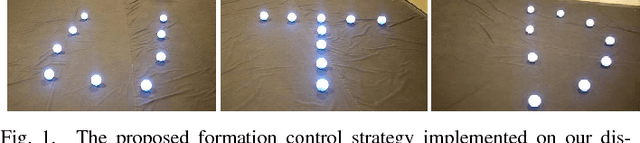
We present a distributed formation control strategy for agents with a variety of dynamics to achieve a desired planar formation. The proposed strategy is fully distributed, does not require inter-agent communication or a common sense of orientation, and can be implemented using relative position measurements acquired by agents in their local coordinate frames. We show how the control designed for agents with the simplest dynamical model, i.e., the single-integrator dynamics, can be extended to holonomic agents with higher-order dynamics such as quadrotors, and nonholonomic agents such as unicycles and cars. We prove that the proposed strategy is robust to saturations in the input, unmodeled dynamics, and switches in the sensing topology. We further show that the control is relaxed in the sense that agents can move along a rotated and scaled control direction without affecting the convergence to the desired formation. This observation is used to design a distributed collision avoidance strategy. We demonstrate the proposed approach in simulations and further present a distributed robotic platform to test the strategy experimentally. Our experimental platform consists of off-the-shelf equipment that can be used to test and validate other multi-agent algorithms. The code and implementation instructions for this platform are available online and free.
Quaternion Based Camera Pose Estimation From Matched Feature Points
Apr 11, 2017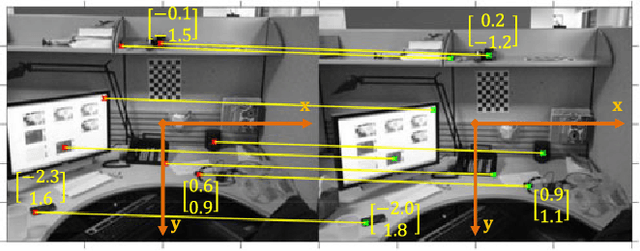
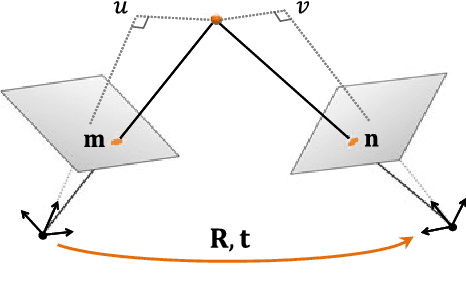
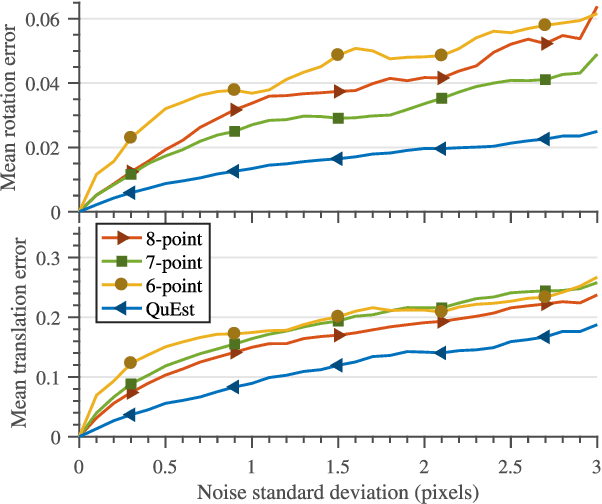
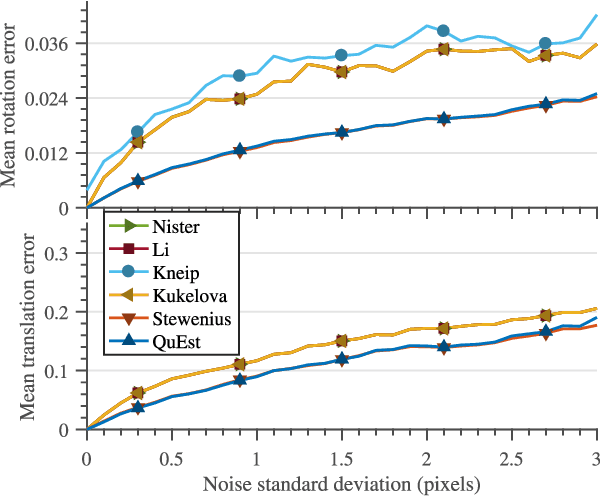
We present a novel solution to the camera pose estimation problem, where rotation and translation of a camera between two views are estimated from matched feature points in the images. The camera pose estimation problem is traditionally solved via algorithms that are based on the essential matrix or the Euclidean homography. With six or more feature points in general positions in the space, essential matrix based algorithms can recover a unique solution. However, such algorithms fail when points are on critical surfaces (e.g., coplanar points) and homography should be used instead. By formulating the problem in quaternions and decoupling the rotation and translation estimation, our proposed algorithm works for all point configurations. Using both simulated and real world images, we compare the estimation accuracy of our algorithm with some of the most commonly used algorithms. Our method is shown to be more robust to noise and outliers. For the benefit of community, we have made the implementation of our algorithm available online and free.