 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDo Large Code Models Understand Programming Concepts? A Black-box Approach
Feb 23, 2024



Large Language Models' success on text generation has also made them better at code generation and coding tasks. While a lot of work has demonstrated their remarkable performance on tasks such as code completion and editing, it is still unclear as to why. We help bridge this gap by exploring to what degree auto-regressive models understand the logical constructs of the underlying programs. We propose Counterfactual Analysis for Programming Concept Predicates (CACP) as a counterfactual testing framework to evaluate whether Large Code Models understand programming concepts. With only black-box access to the model, we use CACP to evaluate ten popular Large Code Models for four different programming concepts. Our findings suggest that current models lack understanding of concepts such as data flow and control flow.
Human-Producible Adversarial Examples
Sep 30, 2023Visual adversarial examples have so far been restricted to pixel-level image manipulations in the digital world, or have required sophisticated equipment such as 2D or 3D printers to be produced in the physical real world. We present the first ever method of generating human-producible adversarial examples for the real world that requires nothing more complicated than a marker pen. We call them $\textbf{adversarial tags}$. First, building on top of differential rendering, we demonstrate that it is possible to build potent adversarial examples with just lines. We find that by drawing just $4$ lines we can disrupt a YOLO-based model in $54.8\%$ of cases; increasing this to $9$ lines disrupts $81.8\%$ of the cases tested. Next, we devise an improved method for line placement to be invariant to human drawing error. We evaluate our system thoroughly in both digital and analogue worlds and demonstrate that our tags can be applied by untrained humans. We demonstrate the effectiveness of our method for producing real-world adversarial examples by conducting a user study where participants were asked to draw over printed images using digital equivalents as guides. We further evaluate the effectiveness of both targeted and untargeted attacks, and discuss various trade-offs and method limitations, as well as the practical and ethical implications of our work. The source code will be released publicly.
Unbiased Face Synthesis With Diffusion Models: Are We There Yet?
Sep 13, 2023



Text-to-image diffusion models have achieved widespread popularity due to their unprecedented image generation capability. In particular, their ability to synthesize and modify human faces has spurred research into using generated face images in both training data augmentation and model performance assessments. In this paper, we study the efficacy and shortcomings of generative models in the context of face generation. Utilizing a combination of qualitative and quantitative measures, including embedding-based metrics and user studies, we present a framework to audit the characteristics of generated faces conditioned on a set of social attributes. We applied our framework on faces generated through state-of-the-art text-to-image diffusion models. We identify several limitations of face image generation that include faithfulness to the text prompt, demographic disparities, and distributional shifts. Furthermore, we present an analytical model that provides insights into how training data selection contributes to the performance of generative models.
SEA: Shareable and Explainable Attribution for Query-based Black-box Attacks
Aug 23, 2023Machine Learning (ML) systems are vulnerable to adversarial examples, particularly those from query-based black-box attacks. Despite various efforts to detect and prevent such attacks, there is a need for a more comprehensive approach to logging, analyzing, and sharing evidence of attacks. While classic security benefits from well-established forensics and intelligence sharing, Machine Learning is yet to find a way to profile its attackers and share information about them. In response, this paper introduces SEA, a novel ML security system to characterize black-box attacks on ML systems for forensic purposes and to facilitate human-explainable intelligence sharing. SEA leverages the Hidden Markov Models framework to attribute the observed query sequence to known attacks. It thus understands the attack's progression rather than just focusing on the final adversarial examples. Our evaluations reveal that SEA is effective at attack attribution, even on their second occurrence, and is robust to adaptive strategies designed to evade forensics analysis. Interestingly, SEA's explanations of the attack behavior allow us even to fingerprint specific minor implementation bugs in attack libraries. For example, we discover that the SignOPT and Square attacks implementation in ART v1.14 sends over 50% specific zero difference queries. We thoroughly evaluate SEA on a variety of settings and demonstrate that it can recognize the same attack's second occurrence with 90+% Top-1 and 95+% Top-3 accuracy.
Theoretically Principled Trade-off for Stateful Defenses against Query-Based Black-Box Attacks
Jul 30, 2023Adversarial examples threaten the integrity of machine learning systems with alarming success rates even under constrained black-box conditions. Stateful defenses have emerged as an effective countermeasure, detecting potential attacks by maintaining a buffer of recent queries and detecting new queries that are too similar. However, these defenses fundamentally pose a trade-off between attack detection and false positive rates, and this trade-off is typically optimized by hand-picking feature extractors and similarity thresholds that empirically work well. There is little current understanding as to the formal limits of this trade-off and the exact properties of the feature extractors/underlying problem domain that influence it. This work aims to address this gap by offering a theoretical characterization of the trade-off between detection and false positive rates for stateful defenses. We provide upper bounds for detection rates of a general class of feature extractors and analyze the impact of this trade-off on the convergence of black-box attacks. We then support our theoretical findings with empirical evaluations across multiple datasets and stateful defenses.
Investigating Stateful Defenses Against Black-Box Adversarial Examples
Mar 17, 2023



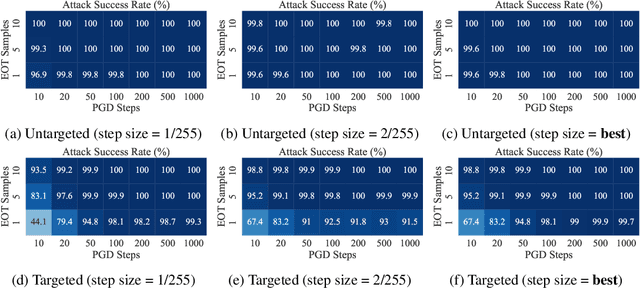
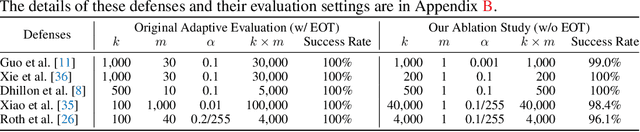
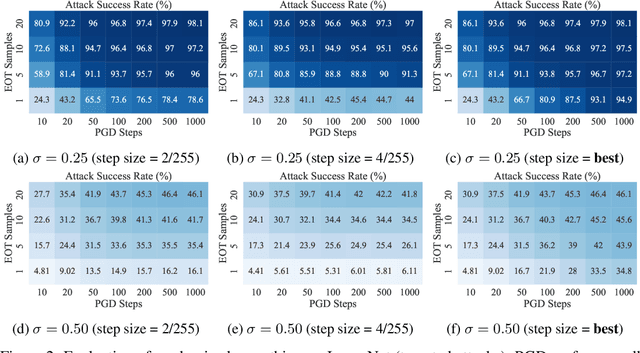
Defending machine-learning (ML) models against white-box adversarial attacks has proven to be extremely difficult. Instead, recent work has proposed stateful defenses in an attempt to defend against a more restricted black-box attacker. These defenses operate by tracking a history of incoming model queries, and rejecting those that are suspiciously similar. The current state-of-the-art stateful defense Blacklight was proposed at USENIX Security '22 and claims to prevent nearly 100% of attacks on both the CIFAR10 and ImageNet datasets. In this paper, we observe that an attacker can significantly reduce the accuracy of a Blacklight-protected classifier (e.g., from 82.2% to 6.4% on CIFAR10) by simply adjusting the parameters of an existing black-box attack. Motivated by this surprising observation, since existing attacks were evaluated by the Blacklight authors, we provide a systematization of stateful defenses to understand why existing stateful defense models fail. Finally, we propose a stronger evaluation strategy for stateful defenses comprised of adaptive score and hard-label based black-box attacks. We use these attacks to successfully reduce even reconfigured versions of Blacklight to as low as 0% robust accuracy.
SkillFence: A Systems Approach to Practically Mitigating Voice-Based Confusion Attacks
Dec 16, 2022



Voice assistants are deployed widely and provide useful functionality. However, recent work has shown that commercial systems like Amazon Alexa and Google Home are vulnerable to voice-based confusion attacks that exploit design issues. We propose a systems-oriented defense against this class of attacks and demonstrate its functionality for Amazon Alexa. We ensure that only the skills a user intends execute in response to voice commands. Our key insight is that we can interpret a user's intentions by analyzing their activity on counterpart systems of the web and smartphones. For example, the Lyft ride-sharing Alexa skill has an Android app and a website. Our work shows how information from counterpart apps can help reduce dis-ambiguities in the skill invocation process. We build SkilIFence, a browser extension that existing voice assistant users can install to ensure that only legitimate skills run in response to their commands. Using real user data from MTurk (N = 116) and experimental trials involving synthetic and organic speech, we show that SkillFence provides a balance between usability and security by securing 90.83% of skills that a user will need with a False acceptance rate of 19.83%.
On the Limitations of Stochastic Pre-processing Defenses
Jun 19, 2022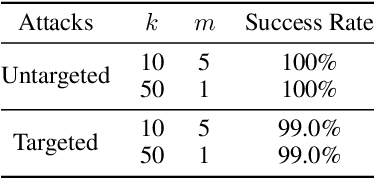
Defending against adversarial examples remains an open problem. A common belief is that randomness at inference increases the cost of finding adversarial inputs. An example of such a defense is to apply a random transformation to inputs prior to feeding them to the model. In this paper, we empirically and theoretically investigate such stochastic pre-processing defenses and demonstrate that they are flawed. First, we show that most stochastic defenses are weaker than previously thought; they lack sufficient randomness to withstand even standard attacks like projected gradient descent. This casts doubt on a long-held assumption that stochastic defenses invalidate attacks designed to evade deterministic defenses and force attackers to integrate the Expectation over Transformation (EOT) concept. Second, we show that stochastic defenses confront a trade-off between adversarial robustness and model invariance; they become less effective as the defended model acquires more invariance to their randomization. Future work will need to decouple these two effects. Our code is available in the supplementary material.
Towards Adversarially Robust Deepfake Detection: An Ensemble Approach
Feb 11, 2022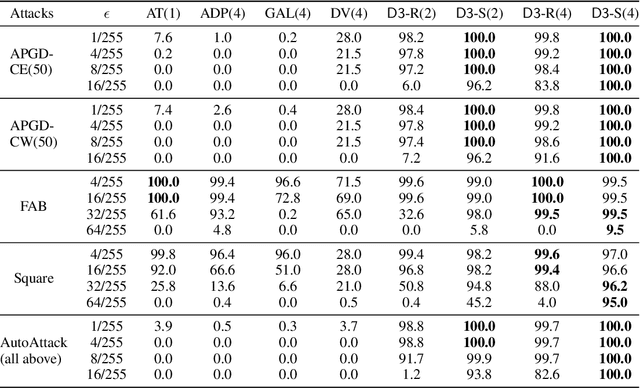
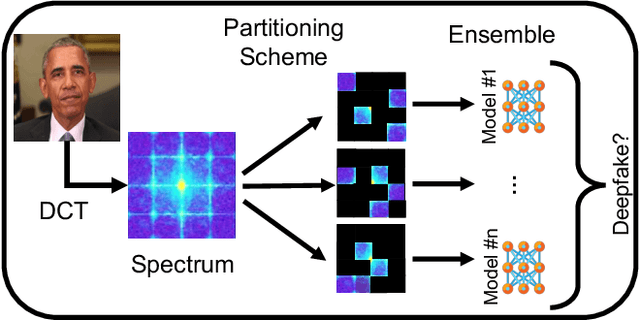
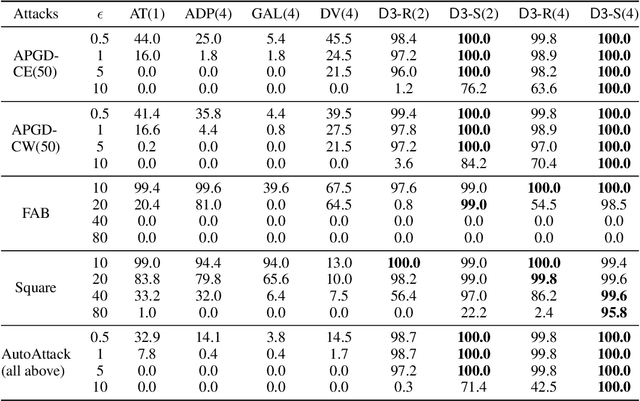
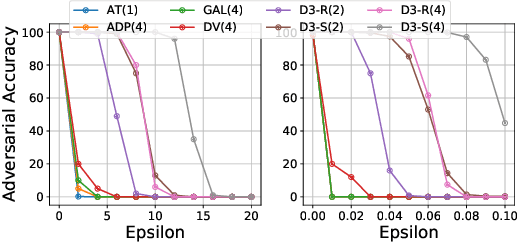
Detecting deepfakes is an important problem, but recent work has shown that DNN-based deepfake detectors are brittle against adversarial deepfakes, in which an adversary adds imperceptible perturbations to a deepfake to evade detection. In this work, we show that a modification to the detection strategy in which we replace a single classifier with a carefully chosen ensemble, in which input transformations for each model in the ensemble induces pairwise orthogonal gradients, can significantly improve robustness beyond the de facto solution of adversarial training. We present theoretical results to show that such orthogonal gradients can help thwart a first-order adversary by reducing the dimensionality of the input subspace in which adversarial deepfakes lie. We validate the results empirically by instantiating and evaluating a randomized version of such "orthogonal" ensembles for adversarial deepfake detection and find that these randomized ensembles exhibit significantly higher robustness as deepfake detectors compared to state-of-the-art deepfake detectors against adversarial deepfakes, even those created using strong PGD-500 attacks.
An Exploration of Multicalibration Uniform Convergence Bounds
Feb 09, 2022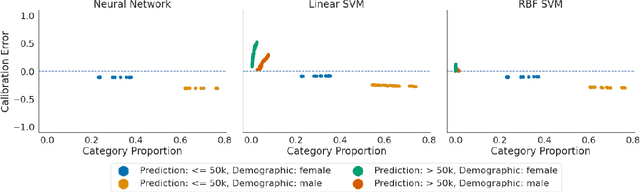
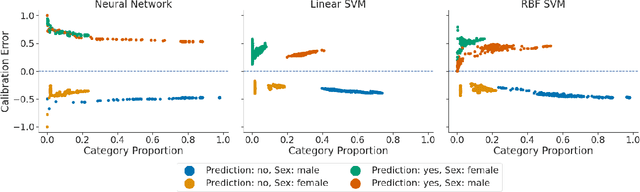
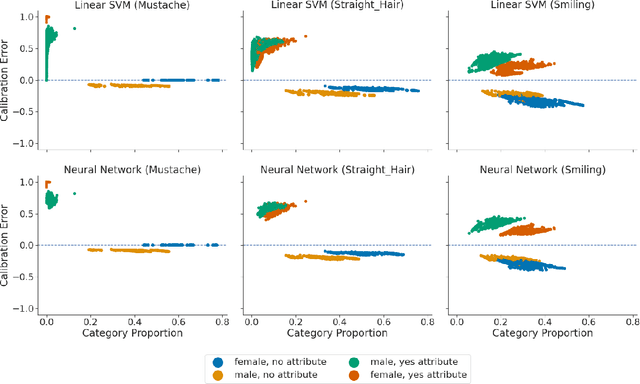
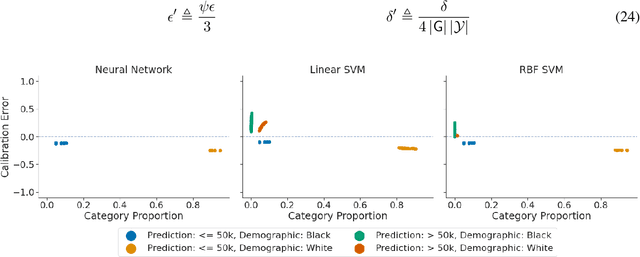
Recent works have investigated the sample complexity necessary for fair machine learning. The most advanced of such sample complexity bounds are developed by analyzing multicalibration uniform convergence for a given predictor class. We present a framework which yields multicalibration error uniform convergence bounds by reparametrizing sample complexities for Empirical Risk Minimization (ERM) learning. From this framework, we demonstrate that multicalibration error exhibits dependence on the classifier architecture as well as the underlying data distribution. We perform an experimental evaluation to investigate the behavior of multicalibration error for different families of classifiers. We compare the results of this evaluation to multicalibration error concentration bounds. Our investigation provides additional perspective on both algorithmic fairness and multicalibration error convergence bounds. Given the prevalence of ERM sample complexity bounds, our proposed framework enables machine learning practitioners to easily understand the convergence behavior of multicalibration error for a myriad of classifier architectures.