 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToTMNet: FFT-Accelerated Toeplitz Temporal Mixing Network for Lightweight Remote Photoplethysmography
Jan 07, 2026Remote photoplethysmography (rPPG) estimates a blood volume pulse (BVP) waveform from facial videos captured by commodity cameras. Although recent deep models improve robustness compared to classical signal-processing approaches, many methods increase computational cost and parameter count, and attention-based temporal modeling introduces quadratic scaling with respect to the temporal length. This paper proposes ToTMNet, a lightweight rPPG architecture that replaces temporal attention with an FFT-accelerated Toeplitz temporal mixing layer. The Toeplitz operator provides full-sequence temporal receptive field using a linear number of parameters in the clip length and can be applied in near-linear time using circulant embedding and FFT-based convolution. ToTMNet integrates the global Toeplitz temporal operator into a compact gated temporal mixer that combines a local depthwise temporal convolution branch with gated global Toeplitz mixing, enabling efficient long-range temporal filtering while only having 63k parameters. Experiments on two datasets, UBFC-rPPG (real videos) and SCAMPS (synthetic videos), show that ToTMNet achieves strong heart-rate estimation accuracy with a compact design. On UBFC-rPPG intra-dataset evaluation, ToTMNet reaches 1.055 bpm MAE with Pearson correlation 0.996. In a synthetic-to-real setting (SCAMPS to UBFC-rPPG), ToTMNet reaches 1.582 bpm MAE with Pearson correlation 0.994. Ablation results confirm that the gating mechanism is important for effectively using global Toeplitz mixing, especially under domain shift. The main limitation of this preprint study is the use of only two datasets; nevertheless, the results indicate that Toeplitz-structured temporal mixing is a practical and efficient alternative to attention for rPPG.
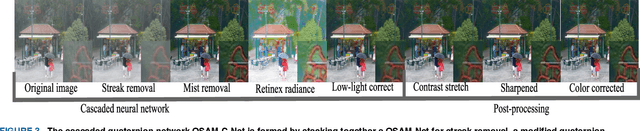
CMAWRNet: Multiple Adverse Weather Removal via a Unified Quaternion Neural Architecture
May 03, 2025



Images used in real-world applications such as image or video retrieval, outdoor surveillance, and autonomous driving suffer from poor weather conditions. When designing robust computer vision systems, removing adverse weather such as haze, rain, and snow is a significant problem. Recently, deep-learning methods offered a solution for a single type of degradation. Current state-of-the-art universal methods struggle with combinations of degradations, such as haze and rain-streak. Few algorithms have been developed that perform well when presented with images containing multiple adverse weather conditions. This work focuses on developing an efficient solution for multiple adverse weather removal using a unified quaternion neural architecture called CMAWRNet. It is based on a novel texture-structure decomposition block, a novel lightweight encoder-decoder quaternion transformer architecture, and an attentive fusion block with low-light correction. We also introduce a quaternion similarity loss function to preserve color information better. The quantitative and qualitative evaluation of the current state-of-the-art benchmarking datasets and real-world images shows the performance advantages of the proposed CMAWRNet compared to other state-of-the-art weather removal approaches dealing with multiple weather artifacts. Extensive computer simulations validate that CMAWRNet improves the performance of downstream applications such as object detection. This is the first time the decomposition approach has been applied to the universal weather removal task.
Quantum-Inspired Edge Detection Algorithms Implementation using New Dynamic Visual Data Representation and Short-Length Convolution Computation
Oct 31, 2022



As the availability of imagery data continues to swell, so do the demands on transmission, storage and processing power. Processing requirements to handle this plethora of data is quickly outpacing the utility of conventional processing techniques. Transitioning to quantum processing and algorithms that offer promising efficiencies over conventional methods can address some of these issues. However, to make this transformation possible, fundamental issues of implementing real time Quantum algorithms must be overcome for crucial processes needed for intelligent analysis applications. For example, consider edge detection tasks which require time-consuming acquisition processes and are further hindered by the complexity of the devices used thus limiting feasibility for implementation in real-time applications. Convolution is another example of an operation that is essential for signal and image processing applications, where the mathematical operations consist of an intelligent mixture of multiplication and addition that require considerable computational resources. This paper studies a new paired transform-based quantum representation and computation of one-dimensional and 2-D signals convolutions and gradients. A new visual data representation is defined to simplify convolution calculations making it feasible to parallelize convolution and gradient operations for more efficient performance. The new data representation is demonstrated on multiple illustrative examples for quantum edge detection, gradients, and convolution. Furthermore, the efficiency of the proposed approach is shown on real-world images.
QSAM-Net: Rain streak removal by quaternion neural network with self-attention module
Aug 08, 2022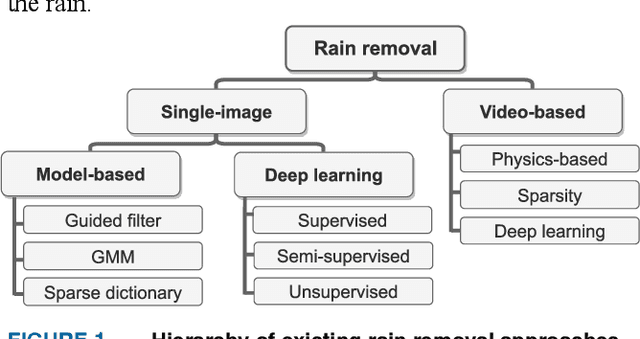
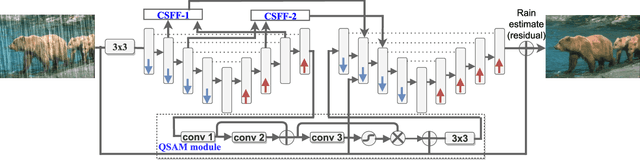

Images captured in real-world applications in remote sensing, image or video retrieval, and outdoor surveillance suffer degraded quality introduced by poor weather conditions. Conditions such as rain and mist, introduce artifacts that make visual analysis challenging and limit the performance of high-level computer vision methods. For time-critical applications where a rapid response is necessary, it becomes crucial to develop algorithms that automatically remove rain, without diminishing the quality of the image contents. This article aims to develop a novel quaternion multi-stage multiscale neural network with a self-attention module called QSAM-Net to remove rain streaks. The novelty of this algorithm is that it requires significantly fewer parameters by a factor of 3.98, over prior methods, while improving visual quality. This is demonstrated by the extensive evaluation and benchmarking on synthetic and real-world rainy images. This feature of QSAM-Net makes the network suitable for implementation on edge devices and applications requiring near real-time performance. The experiments demonstrate that by improving the visual quality of images. In addition, object detection accuracy and training speed are also improved.
A Framework for Multisensory Foresight for Embodied Agents
Sep 15, 2021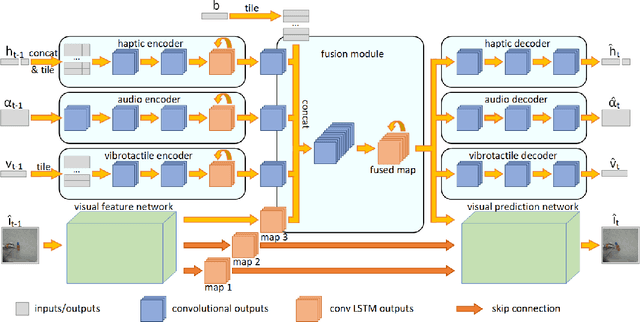
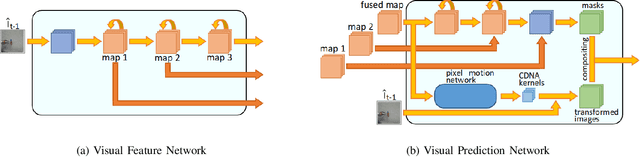
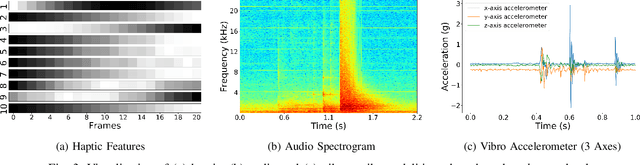
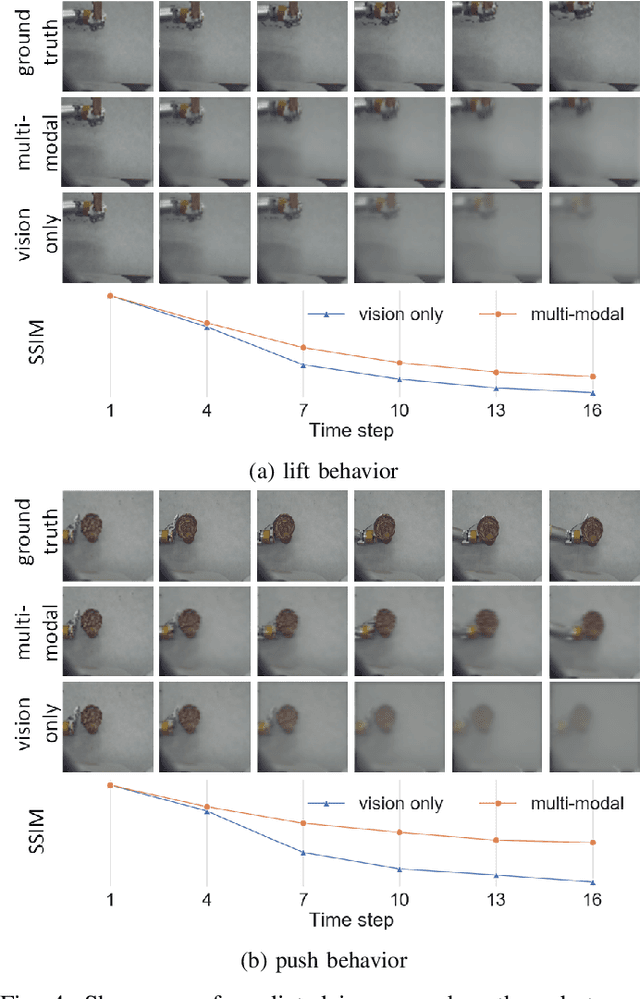
Predicting future sensory states is crucial for learning agents such as robots, drones, and autonomous vehicles. In this paper, we couple multiple sensory modalities with exploratory actions and propose a predictive neural network architecture to address this problem. Most existing approaches rely on large, manually annotated datasets, or only use visual data as a single modality. In contrast, the unsupervised method presented here uses multi-modal perceptions for predicting future visual frames. As a result, the proposed model is more comprehensive and can better capture the spatio-temporal dynamics of the environment, leading to more accurate visual frame prediction. The other novelty of our framework is the use of sub-networks dedicated to anticipating future haptic, audio, and tactile signals. The framework was tested and validated with a dataset containing 4 sensory modalities (vision, haptic, audio, and tactile) on a humanoid robot performing 9 behaviors multiple times on a large set of objects. While the visual information is the dominant modality, utilizing the additional non-visual modalities improves the accuracy of predictions.