 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Whole-body Model Predictive Control for Bipedal Locomotion with a Novel Kino-dynamic Model and Warm-start Method
May 26, 2025Advancements in optimization solvers and computing power have led to growing interest in applying whole-body model predictive control (WB-MPC) to bipedal robots. However, the high degrees of freedom and inherent model complexity of bipedal robots pose significant challenges in achieving fast and stable control cycles for real-time performance. This paper introduces a novel kino-dynamic model and warm-start strategy for real-time WB-MPC in bipedal robots. Our proposed kino-dynamic model combines the linear inverted pendulum plus flywheel and full-body kinematics model. Unlike the conventional whole-body model that rely on the concept of contact wrenches, our model utilizes the zero-moment point (ZMP), reducing baseline computational costs and ensuring consistently low latency during contact state transitions. Additionally, a modularized multi-layer perceptron (MLP) based warm-start strategy is proposed, leveraging a lightweight neural network to provide a good initial guess for each control cycle. Furthermore, we present a ZMP-based whole-body controller (WBC) that extends the existing WBC for explicitly controlling impulses and ZMP, integrating it into the real-time WB-MPC framework. Through various comparative experiments, the proposed kino-dynamic model and warm-start strategy have been shown to outperform previous studies. Simulations and real robot experiments further validate that the proposed framework demonstrates robustness to perturbation and satisfies real-time control requirements during walking.
Multi-Scale Label Relation Learning for Multi-Label Classification Using 1-Dimensional Convolutional Neural Networks
Jul 13, 2021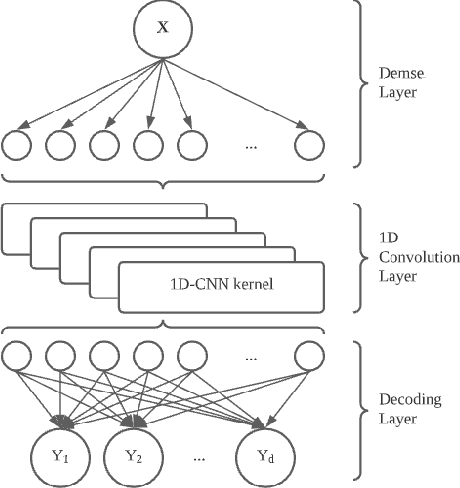
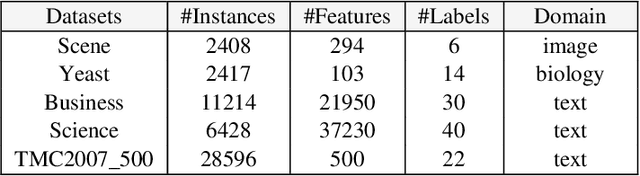
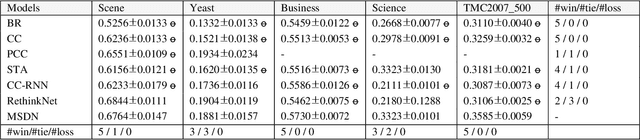
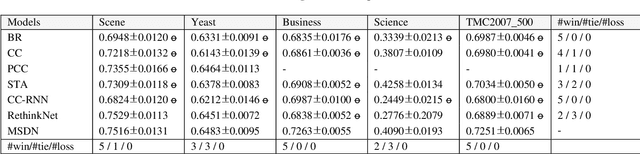
We present Multi-Scale Label Dependence Relation Networks (MSDN), a novel approach to multi-label classification (MLC) using 1-dimensional convolution kernels to learn label dependencies at multi-scale. Modern multi-label classifiers have been adopting recurrent neural networks (RNNs) as a memory structure to capture and exploit label dependency relations. The RNN-based MLC models however tend to introduce a very large number of parameters that may cause under-/over-fitting problems. The proposed method uses the 1-dimensional convolutional neural network (1D-CNN) to serve the same purpose in a more efficient manner. By training a model with multiple kernel sizes, the method is able to learn the dependency relations among labels at multiple scales, while it uses a drastically smaller number of parameters. With public benchmark datasets, we demonstrate that our model can achieve better accuracies with much smaller number of model parameters compared to RNN-based MLC models.