 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCRAFT: Forgetting-Aware Intervention-Based Adaptation for Continual Learning
May 07, 2026Large language models (LLMs) can acquire new capabilities through fine-tuning, but continual adaptation often leads to catastrophic forgetting. We propose CRAFT, a continual learning framework that avoids updating model weights by instead learning low-rank interventions on hidden representations. CRAFT proceeds in three stages: it first routes each task to a group of similar tasks based on output-distribution divergence; it then fine-tunes the model using a Kullback-Leibler (KL) divergence against the group's prior state, which directly controls forgetting and determines convergence; finally, it merges interventions for the updated task into the shared representation using the same KL signal. This design unifies routing, regularization, and merging through a single KL-based objective. CRAFT improves overall performance and reduces forgetting compared to strong LoRA-based approaches across multiple benchmarks and model scales, while remaining robust to task ordering. These results suggest that controlling adaptation in representation space, guided by output-space divergence, provides a scalable and principled approach to continual learning in LLMs.
The Landscape and Challenges of HPC Research and LLMs
Feb 07, 2024

Recently, language models (LMs), especially large language models (LLMs), have revolutionized the field of deep learning. Both encoder-decoder models and prompt-based techniques have shown immense potential for natural language processing and code-based tasks. Over the past several years, many research labs and institutions have invested heavily in high-performance computing, approaching or breaching exascale performance levels. In this paper, we posit that adapting and utilizing such language model-based techniques for tasks in high-performance computing (HPC) would be very beneficial. This study presents our reasoning behind the aforementioned position and highlights how existing ideas can be improved and adapted for HPC tasks.
A Hardware-Aware Framework for Accelerating Neural Architecture Search Across Modalities
May 19, 2022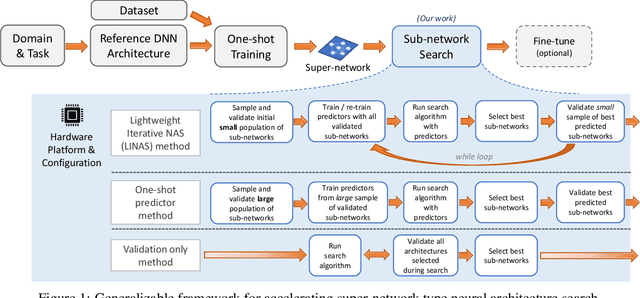
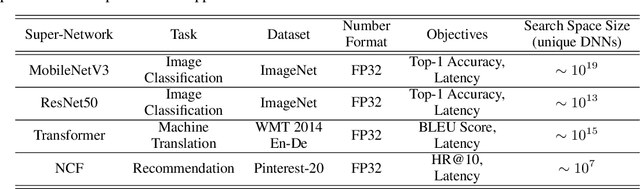
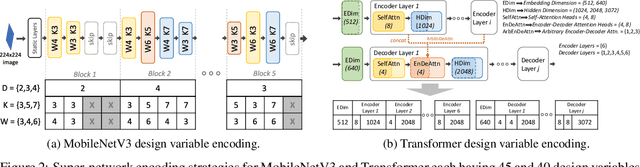
Recent advances in Neural Architecture Search (NAS) such as one-shot NAS offer the ability to extract specialized hardware-aware sub-network configurations from a task-specific super-network. While considerable effort has been employed towards improving the first stage, namely, the training of the super-network, the search for derivative high-performing sub-networks is still under-explored. Popular methods decouple the super-network training from the sub-network search and use performance predictors to reduce the computational burden of searching on different hardware platforms. We propose a flexible search framework that automatically and efficiently finds optimal sub-networks that are optimized for different performance metrics and hardware configurations. Specifically, we show how evolutionary algorithms can be paired with lightly trained objective predictors in an iterative cycle to accelerate architecture search in a multi-objective setting for various modalities including machine translation and image classification.
Improving Place Recognition Using Dynamic Object Detection
Feb 11, 2020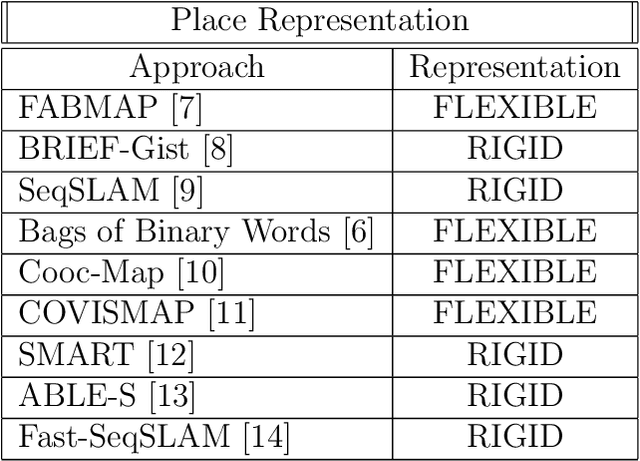
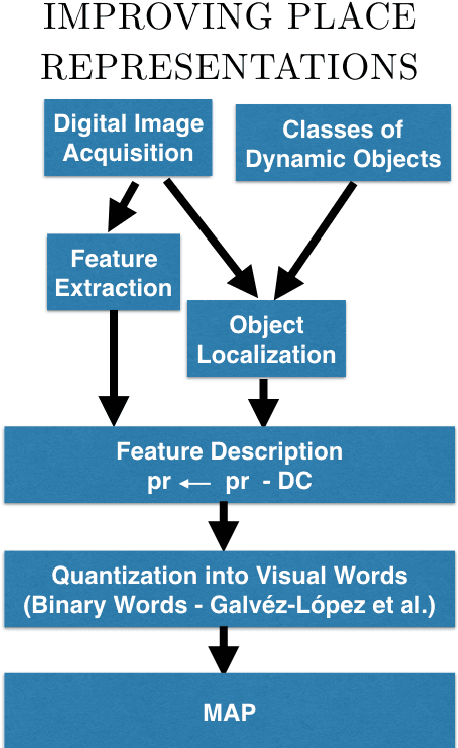
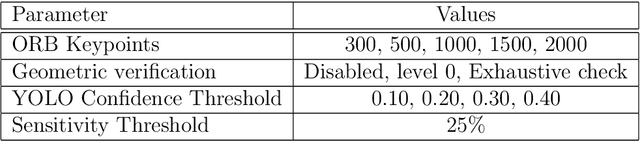
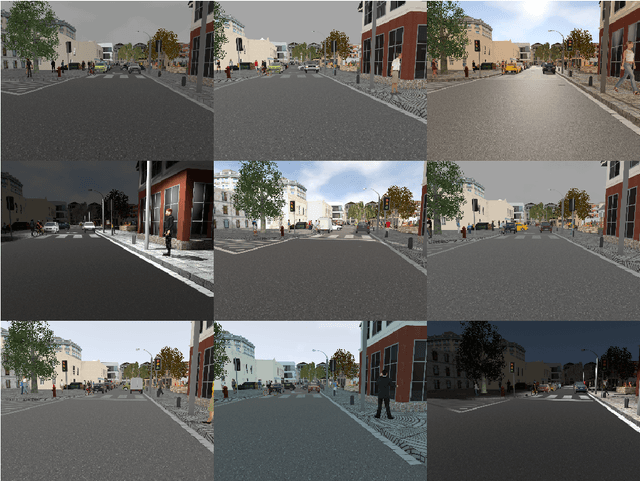
Traditional appearance-based place recognition algorithms based on handcrafted features have proven inadequate in environments with a significant presence of dynamic objects -- objects that may or may not be present in an agent's subsequent visits. Place representations from features extracted using Deep Learning approaches have gained popularity for their robustness and because the algorithms that used them yield better accuracy. Nevertheless, handcrafted features are still popular in devices that have limited resources. This article presents a novel approach that improves place recognition in environments populated by dynamic objects by incorporating the very knowledge of these objects to improve the overall quality of the representations of places used for matching. The proposed approach fuses object detection and place description, Deep Learning and handcrafted features, with the significance of reducing memory and storage requirements. This article demonstrates that the proposed approach yields improved place recognition accuracy, and was evaluated using both synthetic and real-world datasets. The adoption of the proposed approach will significantly improve place recognition results in environments populated by dynamic objects, and explored by devices with limited resources, with particular utility in both indoor and outdoor environments.