 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Robust UAV Tracking in GNSS-Denied Environments: A Multi-LiDAR Multi-UAV Dataset
Oct 13, 2023



With the increasing prevalence of drones in various industries, the navigation and tracking of unmanned aerial vehicles (UAVs) in challenging environments, particularly GNSS-denied areas, have become crucial concerns. To address this need, we present a novel multi-LiDAR dataset specifically designed for UAV tracking. Our dataset includes data from a spinning LiDAR, two solid-state LiDARs with different Field of View (FoV) and scan patterns, and an RGB-D camera. This diverse sensor suite allows for research on new challenges in the field, including limited FoV adaptability and multi-modality data processing. The dataset facilitates the evaluation of existing algorithms and the development of new ones, paving the way for advances in UAV tracking techniques. Notably, we provide data in both indoor and outdoor environments. We also consider variable UAV sizes, from micro-aerial vehicles to more standard commercial UAV platforms. The outdoor trajectories are selected with close proximity to buildings, targeting research in UAV detection in urban areas, e.g., within counter-UAV systems or docking for UAV logistics. In addition to the dataset, we provide a baseline comparison with recent LiDAR-based UAV tracking algorithms, benchmarking the performance with different sensors, UAVs, and algorithms. Importantly, our dataset shows that current methods have shortcomings and are unable to track UAVs consistently across different scenarios.
Comparison of DDS, MQTT, and Zenoh in Edge-to-Edge and Edge-to-Cloud Communication for Distributed ROS 2 Systems
Sep 28, 2023The increased data transmission and number of devices involved in communications among distributed systems make it challenging yet significantly necessary to have an efficient and reliable networking middleware. In robotics and autonomous systems, the wide application of ROS\,2 brings the possibility of utilizing various networking middlewares together with DDS in ROS\,2 for better communication among edge devices or between edge devices and the cloud. However, there is a lack of comprehensive communication performance comparison of integrating these networking middlewares with ROS\,2. In this study, we provide a quantitative analysis for the communication performance of utilized networking middlewares including MQTT and Zenoh alongside DDS in ROS\,2 among a multiple host system. For a complete and reliable comparison, we calculate the latency and throughput of these middlewares by sending distinct amounts and types of data through different network setups including Ethernet, Wi-Fi, and 4G. To further extend the evaluation to real-world application scenarios, we assess the drift error (the position changes) over time caused by these networking middlewares with the robot moving in an identical square-shaped path. Our results show that CycloneDDS performs better under Ethernet while Zenoh performs better under Wi-Fi and 4G. In the actual robot test, the robot moving trajectory drift error over time (96\,s) via Zenoh is the smallest. It is worth noting we have a discussion of the CPU utilization of these networking middlewares and the performance impact caused by enabling the security feature in ROS\,2 at the end of the paper.
UAV Tracking with Solid-State Lidars:Dynamic Multi-Frequency Scan Integration
Apr 24, 2023



With the increasing use of drones across various industries, the navigation and tracking of these unmanned aerial vehicles (UAVs) in challenging environments (such as GNSS-denied environments) have become critical issues. In this paper, we propose a novel method for a ground-based UAV tracking system using a solid-state LiDAR, which dynamically adjusts the LiDAR frame integration time based on the distance to the UAV and its speed. Our method fuses two simultaneous scan integration frequencies for high accuracy and persistent tracking, enabling reliable estimates of the UAV state even in challenging scenarios. The use of the Inverse Covariance Intersection method and Kalman filters allow for better tracking accuracy and can handle challenging tracking scenarios. We have performed a number of experiments for evaluating the performance of the proposed tracking system and identifying its limitations. Our experimental results demonstrate that the proposed method achieves comparable tracking performance to the established baseline method, while also providing more reliable and accurate tracking when only one of the frequencies is available or unreliable.
Loosely Coupled Odometry, UWB Ranging, and Cooperative Spatial Detection for Relative Monte-Carlo Multi-Robot Localization
Apr 13, 2023



As mobile robots become more ubiquitous, their deployments grow across use cases where GNSS positioning is either unavailable or unreliable. This has led to increased interest in multi-modal relative localization methods. Complementing onboard odometry, ranging allows for relative state estimation, with ultra-wideband (UWB) ranging having gained widespread recognition due to its low cost and centimeter-level out-of-box accuracy. Infrastructure-free localization methods allow for more dynamic, ad-hoc, and flexible deployments, yet they have received less attention from the research community. In this work, we propose a cooperative relative multi-robot localization where we leverage inter-robot ranging and simultaneous spatial detections of objects in the environment. To achieve this, we equip robots with a single UWB transceiver and a stereo camera. We propose a novel Monte-Carlo approach to estimate relative states by either employing only UWB ranges or dynamically integrating simultaneous spatial detections from the stereo cameras. We also address the challenges for UWB ranging error mitigation, especially in non-line-of-sight, with a study on different LSTM networks to estimate the ranging error. The proposed approach has multiple benefits. First, we show that a single range is enough to estimate the accurate relative states of two robots when fusing odometry measurements. Second, our experiments also demonstrate that our approach surpasses traditional methods such as multilateration in terms of accuracy. Third, to increase accuracy even further, we allow for the integration of cooperative spatial detections. Finally, we show how ROS 2 and Zenoh can be integrated to build a scalable wireless communication solution for multi-robot systems. The experimental validation includes real-time deployment and autonomous navigation based on the relative positioning method.
UAV Tracking with Lidar as a Camera Sensors in GNSS-Denied Environments
Mar 01, 2023LiDAR has become one of the primary sensors in robotics and autonomous system for high-accuracy situational awareness. In recent years, multi-modal LiDAR systems emerged, and among them, LiDAR-as-a-camera sensors provide not only 3D point clouds but also fixed-resolution 360{\deg}panoramic images by encoding either depth, reflectivity, or near-infrared light in the image pixels. This potentially brings computer vision capabilities on top of the potential of LiDAR itself. In this paper, we are specifically interested in utilizing LiDARs and LiDAR-generated images for tracking Unmanned Aerial Vehicles (UAVs) in real-time which can benefit applications including docking, remote identification, or counter-UAV systems, among others. This is, to the best of our knowledge, the first work that explores the possibility of fusing the images and point cloud generated by a single LiDAR sensor to track a UAV without a priori known initialized position. We trained a custom YOLOv5 model for detecting UAVs based on the panoramic images collected in an indoor experiment arena with a MOCAP system. By integrating with the point cloud, we are able to continuously provide the position of the UAV. Our experiment demonstrated the effectiveness of the proposed UAV tracking approach compared with methods based only on point clouds or images. Additionally, we evaluated the real-time performance of our approach on the Nvidia Jetson Nano, a popular mobile computing platform.
Towards Lifelong Federated Learning in Autonomous Mobile Robots with Continuous Sim-to-Real Transfer
May 31, 2022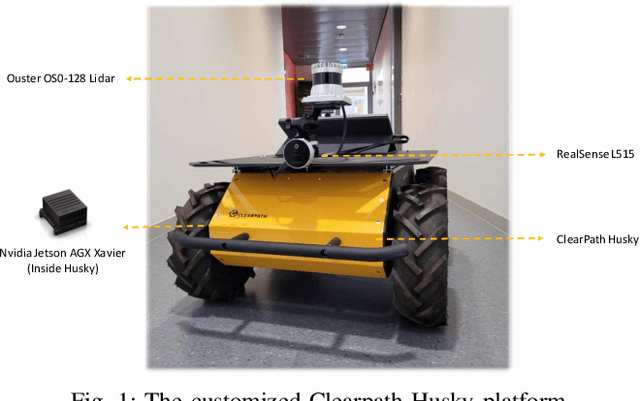
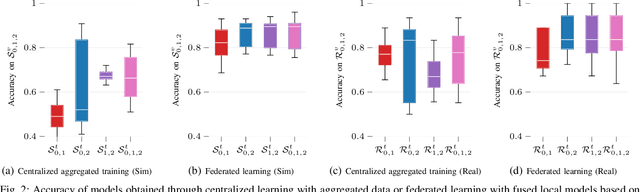
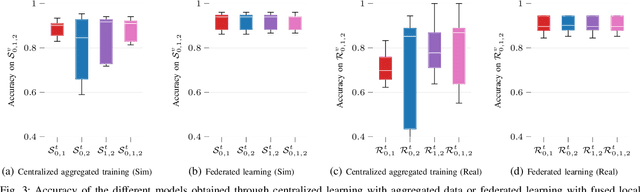
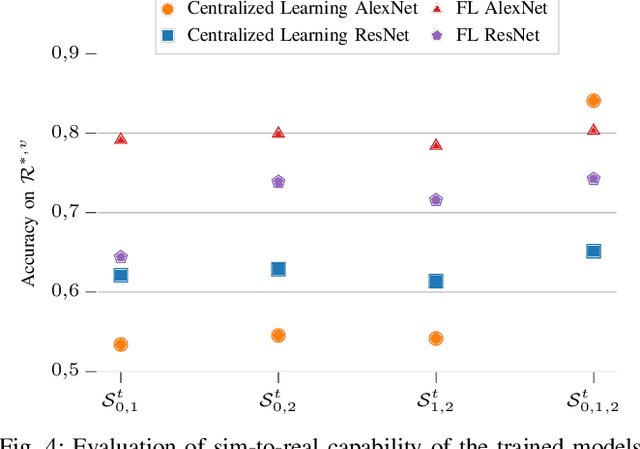
The role of deep learning (DL) in robotics has significantly deepened over the last decade. Intelligent robotic systems today are highly connected systems that rely on DL for a variety of perception, control, and other tasks. At the same time, autonomous robots are being increasingly deployed as part of fleets, with collaboration among robots becoming a more relevant factor. From the perspective of collaborative learning, federated learning (FL) enables continuous training of models in a distributed, privacy-preserving way. This paper focuses on vision-based obstacle avoidance for mobile robot navigation. On this basis, we explore the potential of FL for distributed systems of mobile robots enabling continuous learning via the engagement of robots in both simulated and real-world scenarios. We extend previous works by studying the performance of different image classifiers for FL, compared to centralized, cloud-based learning with a priori aggregated data. We also introduce an approach to continuous learning from mobile robots with extended sensor suites able to provide automatically labeled data while they are completing other tasks. We show that higher accuracies can be achieved by training the models in both simulation and reality, enabling continuous updates to deployed models.
Cooperative UWB-Based Localization for Outdoors Positioning and Navigation of UAVs aided by Ground Robots
Apr 01, 2021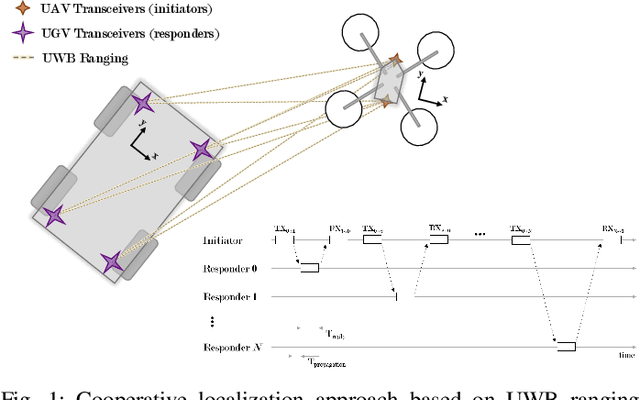
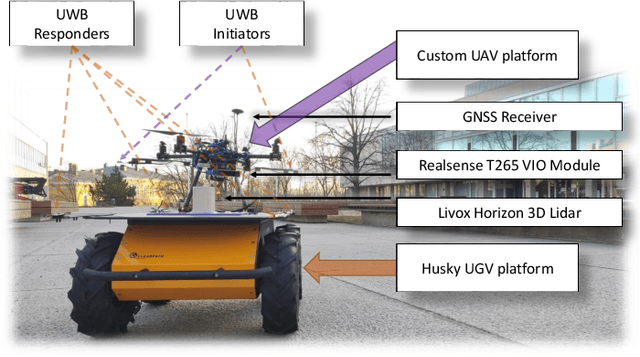
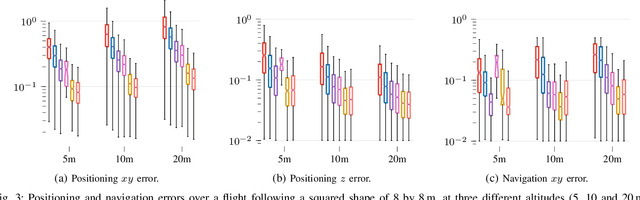
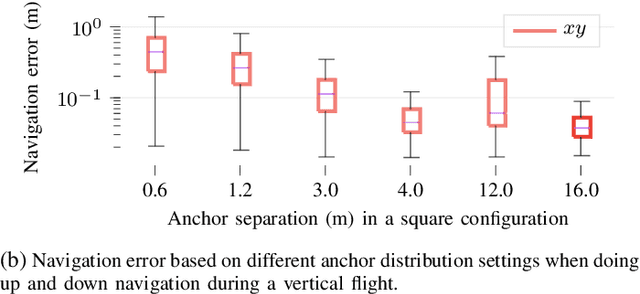
Unmanned aerial vehicles (UAVs) are becoming largely ubiquitous with an increasing demand for aerial data. Accurate navigation and localization, required for precise data collection in many industrial applications, often relies on RTK GNSS. These systems, able of centimeter-level accuracy, require a setup and calibration process and are relatively expensive. This paper addresses the problem of accurate positioning and navigation of UAVs through cooperative localization. Inexpensive ultra-wideband (UWB) transceivers installed on both the UAV and a support ground robot enable centimeter-level relative positioning. With fast deployment and wide setup flexibility, the proposed system is able to accommodate different environments and can also be utilized in GNSS-denied environments. Through extensive simulations and test fields, we evaluate the accuracy of the system and compare it to GNSS in urban environments where multipath transmission degrades accuracy. For completeness, we include visual-inertial odometry in the experiments and compare the performance with the UWB-based cooperative localization.