 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSAFEVPR: Patch-Based Conformal Verification for Safe Cross-Condition Sequence Visual Place Recognition
May 27, 2026Sequence-based visual place recognition (VPR) for SLAM and robot relocalization must decide whether the retrieved top-1 candidate is safe to accept. Conformal prediction is a natural framework for this accept/reject decision, but its finite-sample guarantees rely on exchangeability between calibration and deployment (test) data, which is violated under cross-condition deployment. We introduce SAFEVPR, a non-trainable verification-and-calibration pipeline for safe cross-condition sequence VPR. SAFEVPR replaces the standard backbone cosine similarity with a mutual-nearest-neighbour (MNN) patch-matching score computed from frozen DINOv2 ViT features, and replaces flat Learn-Then-Test calibration with Mondrian conformal LTT, fitting separate Bonferroni-corrected thresholds across score bins. Under exchangeability, these thresholds would provide finite-sample false-discovery-rate (FDR) control; under condition shift, we evaluate empirical validity per deployment. Across 23 cross-condition setups from Oxford RobotCar, NCLT, and St Lucia datasets, using three frozen VPR backbones, SAFEVPR is empirically valid on 23/23 setups at target FDR alpha = 0.10, achieving mean accepted FDR 0.014 and mean true-positive rate (TPR) 0.75. The results show that raw discrimination alone is not sufficient for conformal validity: AnyLoc-VLAD and Super-Point+LightGlue reach comparable area under the receiver operating characteristic curve (AUROC) but fail more setups under the same calibration. On textureless repetitive scenery, SAFEVPR safely abstains rather than accepting unreliable matches. Code is available at https://github.com/Hasar12139/SafeVPR.
Event-based Sensor Fusion and Application on Odometry: A Survey
Oct 20, 2024



Event cameras, inspired by biological vision, are asynchronous sensors that detect changes in brightness, offering notable advantages in environments characterized by high-speed motion, low lighting, or wide dynamic range. These distinctive properties render event cameras particularly effective for sensor fusion in robotics and computer vision, especially in enhancing traditional visual or LiDAR-inertial odometry. Conventional frame-based cameras suffer from limitations such as motion blur and drift, which can be mitigated by the continuous, low-latency data provided by event cameras. Similarly, LiDAR-based odometry encounters challenges related to the loss of geometric information in environments such as corridors. To address these limitations, unlike the existing event camera-related surveys, this paper presents a comprehensive overview of recent advancements in event-based sensor fusion for odometry applications particularly, investigating fusion strategies that incorporate frame-based cameras, inertial measurement units (IMUs), and LiDAR. The survey critically assesses the contributions of these fusion methods to improving odometry performance in complex environments, while highlighting key applications, and discussing the strengths, limitations, and unresolved challenges. Additionally, it offers insights into potential future research directions to advance event-based sensor fusion for next-generation odometry applications.
UAV Tracking with Solid-State Lidars:Dynamic Multi-Frequency Scan Integration
Apr 24, 2023



With the increasing use of drones across various industries, the navigation and tracking of these unmanned aerial vehicles (UAVs) in challenging environments (such as GNSS-denied environments) have become critical issues. In this paper, we propose a novel method for a ground-based UAV tracking system using a solid-state LiDAR, which dynamically adjusts the LiDAR frame integration time based on the distance to the UAV and its speed. Our method fuses two simultaneous scan integration frequencies for high accuracy and persistent tracking, enabling reliable estimates of the UAV state even in challenging scenarios. The use of the Inverse Covariance Intersection method and Kalman filters allow for better tracking accuracy and can handle challenging tracking scenarios. We have performed a number of experiments for evaluating the performance of the proposed tracking system and identifying its limitations. Our experimental results demonstrate that the proposed method achieves comparable tracking performance to the established baseline method, while also providing more reliable and accurate tracking when only one of the frequencies is available or unreliable.
UAV Tracking with Lidar as a Camera Sensors in GNSS-Denied Environments
Mar 01, 2023LiDAR has become one of the primary sensors in robotics and autonomous system for high-accuracy situational awareness. In recent years, multi-modal LiDAR systems emerged, and among them, LiDAR-as-a-camera sensors provide not only 3D point clouds but also fixed-resolution 360{\deg}panoramic images by encoding either depth, reflectivity, or near-infrared light in the image pixels. This potentially brings computer vision capabilities on top of the potential of LiDAR itself. In this paper, we are specifically interested in utilizing LiDARs and LiDAR-generated images for tracking Unmanned Aerial Vehicles (UAVs) in real-time which can benefit applications including docking, remote identification, or counter-UAV systems, among others. This is, to the best of our knowledge, the first work that explores the possibility of fusing the images and point cloud generated by a single LiDAR sensor to track a UAV without a priori known initialized position. We trained a custom YOLOv5 model for detecting UAVs based on the panoramic images collected in an indoor experiment arena with a MOCAP system. By integrating with the point cloud, we are able to continuously provide the position of the UAV. Our experiment demonstrated the effectiveness of the proposed UAV tracking approach compared with methods based only on point clouds or images. Additionally, we evaluated the real-time performance of our approach on the Nvidia Jetson Nano, a popular mobile computing platform.
A Benchmark for Multi-Modal Lidar SLAM with Ground Truth in GNSS-Denied Environments
Oct 03, 2022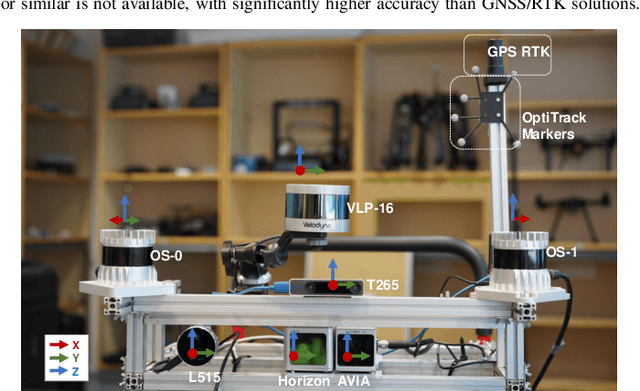
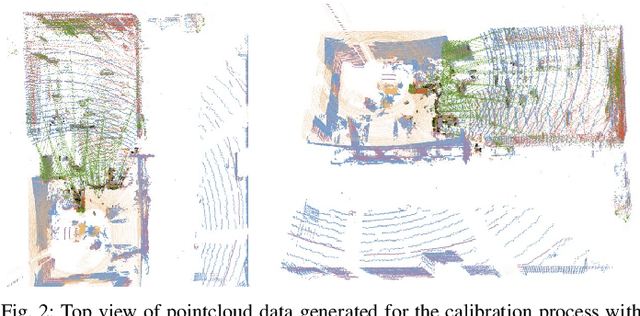
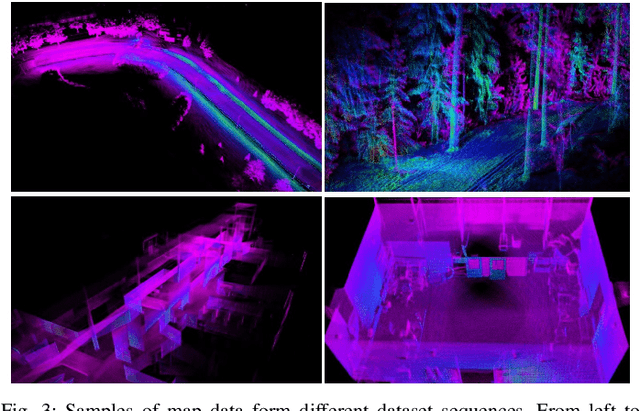
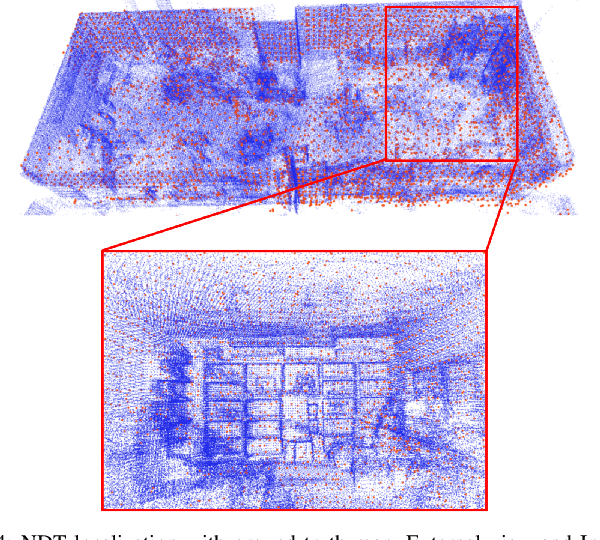
Lidar-based simultaneous localization and mapping (SLAM) approaches have obtained considerable success in autonomous robotic systems. This is in part owing to the high-accuracy of robust SLAM algorithms and the emergence of new and lower-cost lidar products. This study benchmarks current state-of-the-art lidar SLAM algorithms with a multi-modal lidar sensor setup showcasing diverse scanning modalities (spinning and solid-state) and sensing technologies, and lidar cameras, mounted on a mobile sensing and computing platform. We extend our previous multi-modal multi-lidar dataset with additional sequences and new sources of ground truth data. Specifically, we propose a new multi-modal multi-lidar SLAM-assisted and ICP-based sensor fusion method for generating ground truth maps. With these maps, we then match real-time pointcloud data using a natural distribution transform (NDT) method to obtain the ground truth with full 6 DOF pose estimation. This novel ground truth data leverages high-resolution spinning and solid-state lidars. We also include new open road sequences with GNSS-RTK data and additional indoor sequences with motion capture (MOCAP) ground truth, complementing the previous forest sequences with MOCAP data. We perform an analysis of the positioning accuracy achieved with ten different SLAM algorithm and lidar combinations. We also report the resource utilization in four different computational platforms and a total of five settings (Intel and Jetson ARM CPUs). Our experimental results show that current state-of-the-art lidar SLAM algorithms perform very differently for different types of sensors. More results, code, and the dataset can be found at: \href{https://github.com/TIERS/tiers-lidars-dataset-enhanced}{github.com/TIERS/tiers-lidars-dataset-enhanced.