 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Impact-Rich Rotational Maneuvers via Centroidal Velocity Rewards and Sim-to-Real Techniques: A One-Leg Hopper Flip Case Study
May 18, 2025


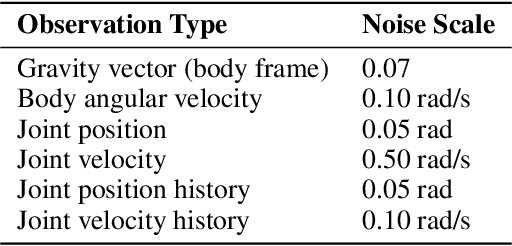
Dynamic rotational maneuvers, such as front flips, inherently involve large angular momentum generation and intense impact forces, presenting major challenges for reinforcement learning and sim-to-real transfer. In this work, we propose a general framework for learning and deploying impact-rich, rotation-intensive behaviors through centroidal velocity-based rewards and actuator-aware sim-to-real techniques. We identify that conventional link-level reward formulations fail to induce true whole-body rotation and introduce a centroidal angular velocity reward that accurately captures system-wide rotational dynamics. To bridge the sim-to-real gap under extreme conditions, we model motor operating regions (MOR) and apply transmission load regularization to ensure realistic torque commands and mechanical robustness. Using the one-leg hopper front flip as a representative case study, we demonstrate the first successful hardware realization of a full front flip. Our results highlight that incorporating centroidal dynamics and actuator constraints is critical for reliably executing highly dynamic motions.
Design of a 3-DOF Hopping Robot with an Optimized Gearbox: An Intermediate Platform Toward Bipedal Robots
May 18, 2025



This paper presents a 3-DOF hopping robot with a human-like lower-limb joint configuration and a flat foot, capable of performing dynamic and repetitive jumping motions. To achieve both high torque output and a large hollow shaft diameter for efficient cable routing, a compact 3K compound planetary gearbox was designed using mixed-integer nonlinear programming for gear tooth optimization. To meet performance requirements within the constrained joint geometry, all major components-including the actuator, motor driver, and communication interface-were custom-designed. The robot weighs 12.45 kg, including a dummy mass, and measures 840 mm in length when the knee joint is fully extended. A reinforcement learning-based controller was employed, and robot's performance was validated through hardware experiments, demonstrating stable and repetitive hopping motions in response to user inputs. These experimental results indicate that the platform serves as a solid foundation for future bipedal robot development.
Dynamic Humanoid Locomotion over Uneven Terrain With Streamlined Perception-Control Pipeline
Nov 30, 2020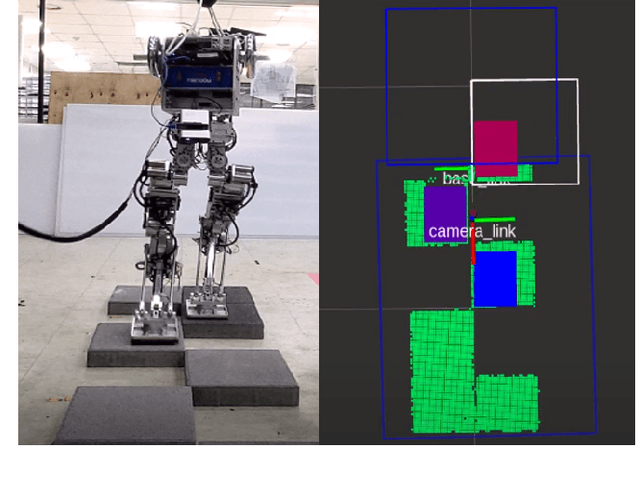
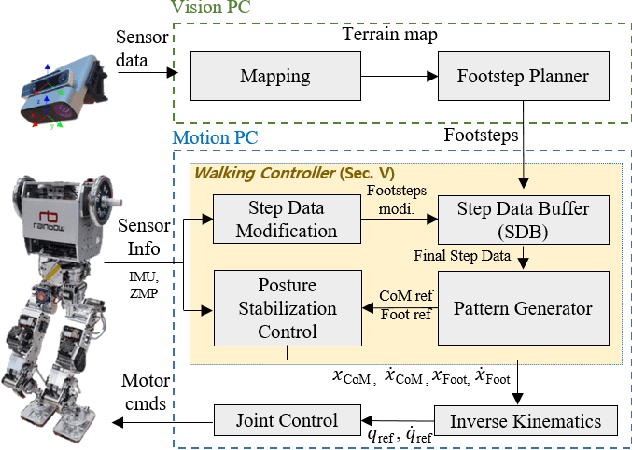
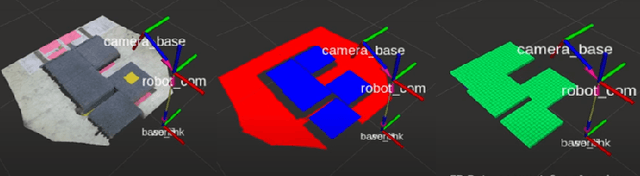
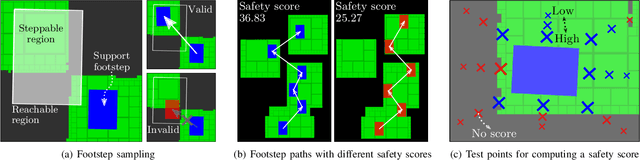
Although bipedal locomotion provides the ability to traverse unstructured environments, it requires careful planning and control to safely walk across without falling. This poses an integrated challenge for the robot to perceive, plan, and control its movements, especially with dynamic motions where the robot may have to adapt its swing-leg trajectory onthe-fly in order to safely place its foot on the uneven terrain. In this paper we present an efficient geometric footstep planner and the corresponding walking controller that enables a humanoid robot to dynamically walk across uneven terrain at speeds up to 0.3 m/s. As dynamic locomotion, we refer first to the continuous walking motion without stopping, and second to the on-the-fly replanning of the landing footstep position in middle of the swing phase during the robot gait cycle. This is mainly achieved through the streamlined integration between an efficient sampling-based planner and robust walking controller. The footstep planner is able to generate feasible footsteps within 5 milliseconds, and the controller is able to generate a new corresponding swing leg trajectory as well as the wholebody motion to dynamically balance the robot to the newly updated footsteps. The proposed perception-control pipeline is evaluated and demonstrated with real experiments using a fullscale humanoid to traverse across uneven terrains featured by static stepping stones, dynamically movable stepping stone, or narrow path.