 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Survey of Asymptotically Optimal Sampling-based Motion Planning Methods
Sep 22, 2020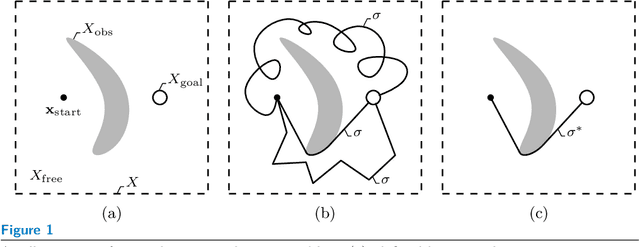
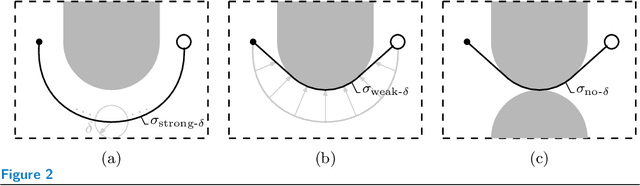
Motion planning is a fundamental problem in autonomous robotics. It requires finding a path to a specified goal that avoids obstacles and obeys a robot's limitations and constraints. It is often desirable for this path to also optimize a cost function, such as path length. Formal path-quality guarantees for continuously valued search spaces are an active area of research interest. Recent results have proven that some sampling-based planning methods probabilistically converge towards the optimal solution as computational effort approaches infinity. This survey summarizes the assumptions behind these popular asymptotically optimal techniques and provides an introduction to the significant ongoing research on this topic.
Proactive Estimation of Occlusions and Scene Coverage for Planning Next Best Views in an Unstructured Representation
Sep 09, 2020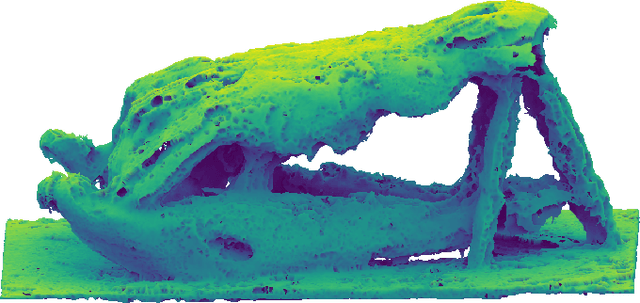
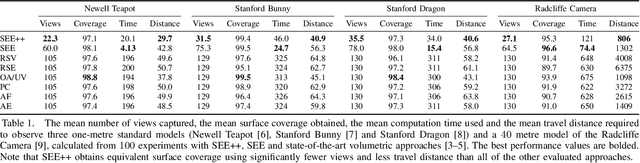
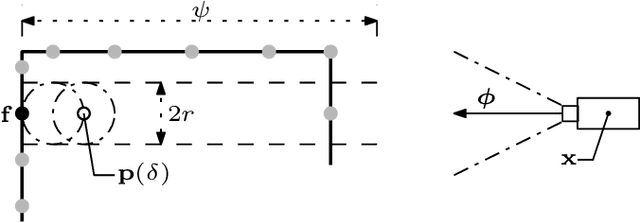
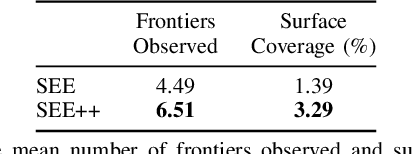
The process of planning views to observe a scene is known as the Next Best View (NBV) problem. Approaches often aim to obtain high-quality scene observations while reducing the number of views, travel distance and computational cost. Considering occlusions and scene coverage can significantly reduce the number of views and travel distance required to obtain an observation. Structured representations (e.g., a voxel grid or surface mesh) typically use raycasting to evaluate the visibility of represented structures but this is often computationally expensive. Unstructured representations (e.g., point density) avoid the computational overhead of maintaining and raycasting a structure imposed on the scene but as a result do not proactively predict the success of future measurements. This paper presents proactive solutions for handling occlusions and considering scene coverage with an unstructured representation. Their performance is evaluated by extending the density-based Surface Edge Explorer (SEE). Experiments show that these techniques allow an unstructured representation to observe scenes with fewer views and shorter distances while retaining high observation quality and low computational cost.
* For a video of SEE++ go to https://www.youtube.com/watch?v=4r2Z85zccms . For an open-source version of SEE++ go to https://github.com/robotic-esp/see-public . Documentation can be found at https://robotic-esp.github.io/see-public
Adaptively Informed Trees (AIT*): Fast Asymptotically Optimal Path Planning through Adaptive Heuristics
Mar 05, 2020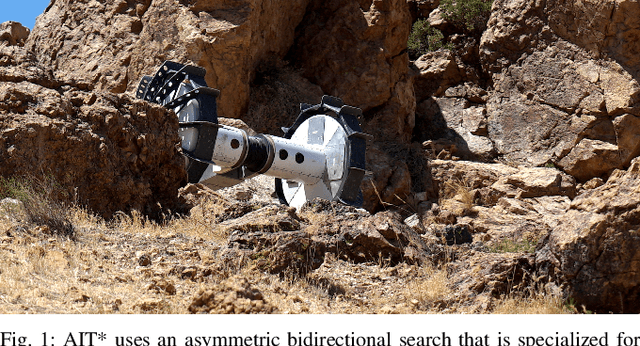
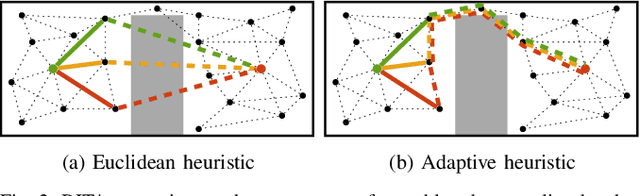
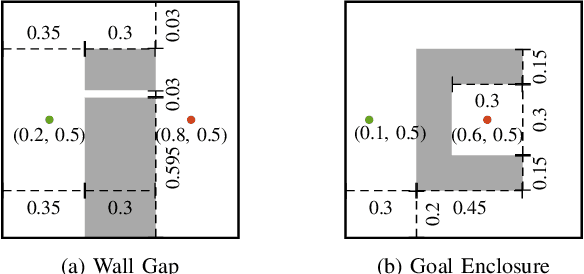
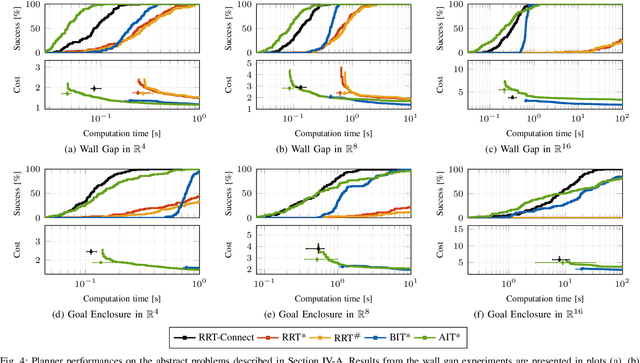
Informed sampling-based planning algorithms exploit problem knowledge for better search performance. This knowledge is often expressed as heuristic estimates of solution cost and used to order the search. The practical improvement of this informed search depends on the accuracy of the heuristic. Selecting an appropriate heuristic is difficult. Heuristics applicable to an entire problem domain are often simple to define and inexpensive to evaluate but may not be beneficial for a specific problem instance. Heuristics specific to a problem instance are often difficult to define or expensive to evaluate but can make the search itself trivial. This paper presents Adaptively Informed Trees (AIT*), an almost-surely asymptotically optimal sampling-based planner based on BIT*. AIT* adapts its search to each problem instance by using an asymmetric bidirectional search to simultaneously estimate and exploit a problem-specific heuristic. This allows it to quickly find initial solutions and converge towards the optimum. AIT* solves the tested problems as fast as RRT-Connect while also converging towards the optimum.
Advanced BIT* (ABIT*): Sampling-Based Planning with Advanced Graph-Search Techniques
Feb 16, 2020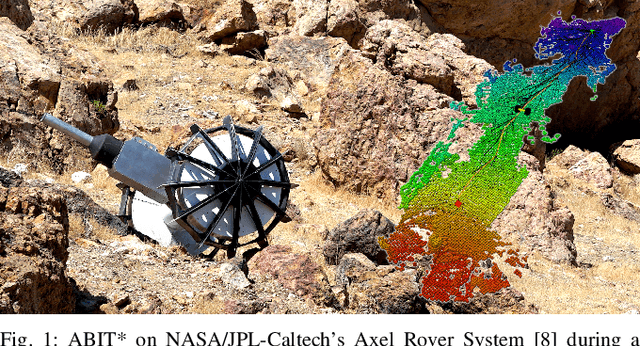
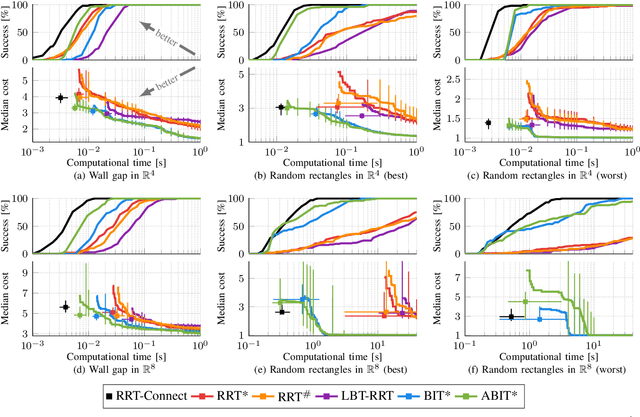
Path planning is an active area of research essential for many applications in robotics. Popular techniques include graph-based searches and sampling-based planners. These approaches are powerful but have limitations. This paper continues work to combine their strengths and mitigate their limitations using a unified planning paradigm. It does this by viewing the path planning problem as the two subproblems of search and approximation and using advanced graph-search techniques on a sampling-based approximation. This perspective leads to Advanced BIT*. ABIT* combines truncated anytime graph-based searches, such as ATD*, with anytime almost-surely asymptotically optimal sampling-based planners, such as RRT*. This allows it to quickly find initial solutions and then converge towards the optimum in an anytime manner. ABIT* outperforms existing single-query, sampling-based planners on the tested problems in $\mathbb{R}^{4}$ and $\mathbb{R}^{8}$, and was demonstrated on real-world problems with NASA/JPL-Caltech.
Occlusion-Robust MVO: Multimotion Estimation Through Occlusion Via Motion Closure
May 13, 2019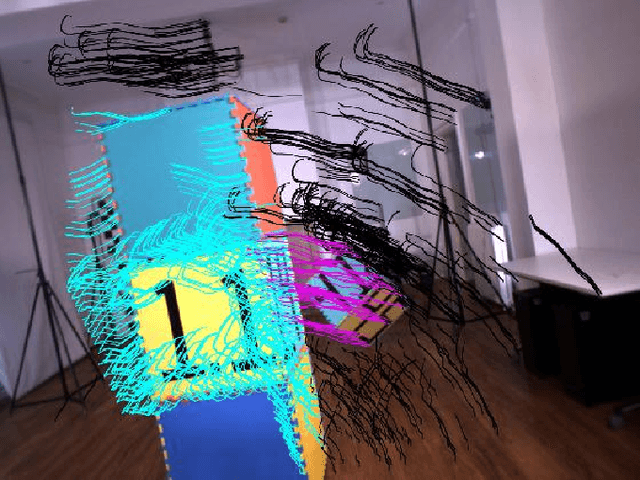
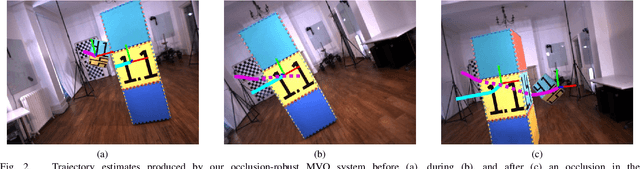

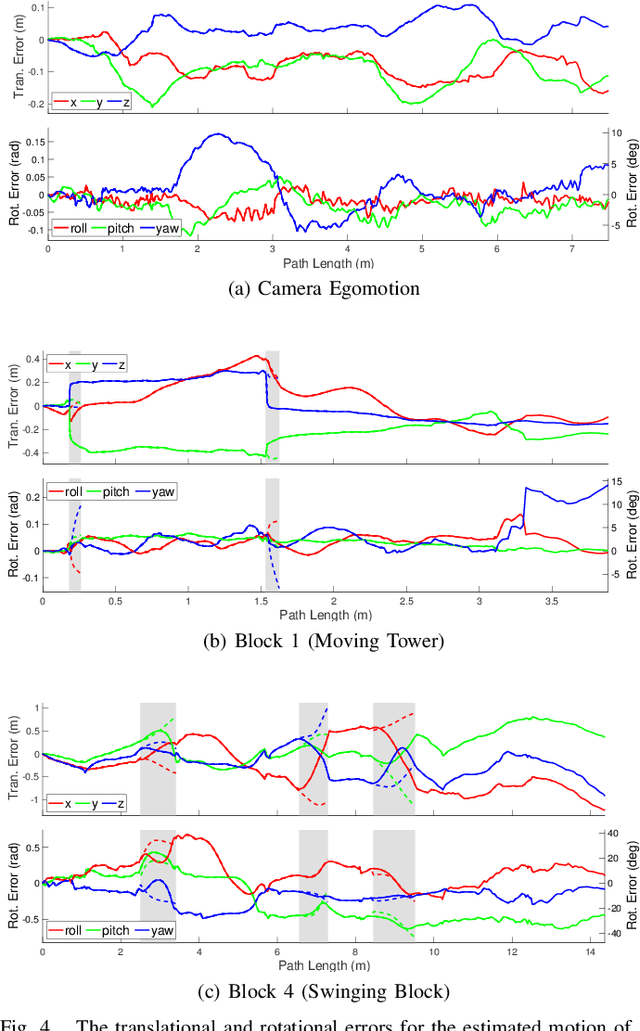
Visual motion estimation is an integral and well-studied challenge in autonomous navigation. Recent work has focused on addressing multimotion estimation, which is especially challenging in highly dynamic environments. Such environments not only comprise multiple, complex motions but also tend to exhibit significant occlusion. Previous work in multiple object tracking focuses on maintaining the integrity of object tracks but usually relies on specific appearance-based descriptors or constrained motion models. These approaches are very effective in specific applications but do not generalize to the full multimotion estimation problem. This paper extends the multimotion visual odometry (MVO) pipeline to estimate multiple motions through occlusion, including the camera egomotion, by employing physically founded motion priors. This allows the pipeline to consistently estimate the full trajectory of every motion in a scene and recognize when temporarily occluded motions become unoccluded. The estimation performance of the pipeline is evaluated on real-world data from the Oxford Multimotion Dataset.
The Oxford Multimotion Dataset: Multiple SE(3) Motions with Ground Truth
Jan 05, 2019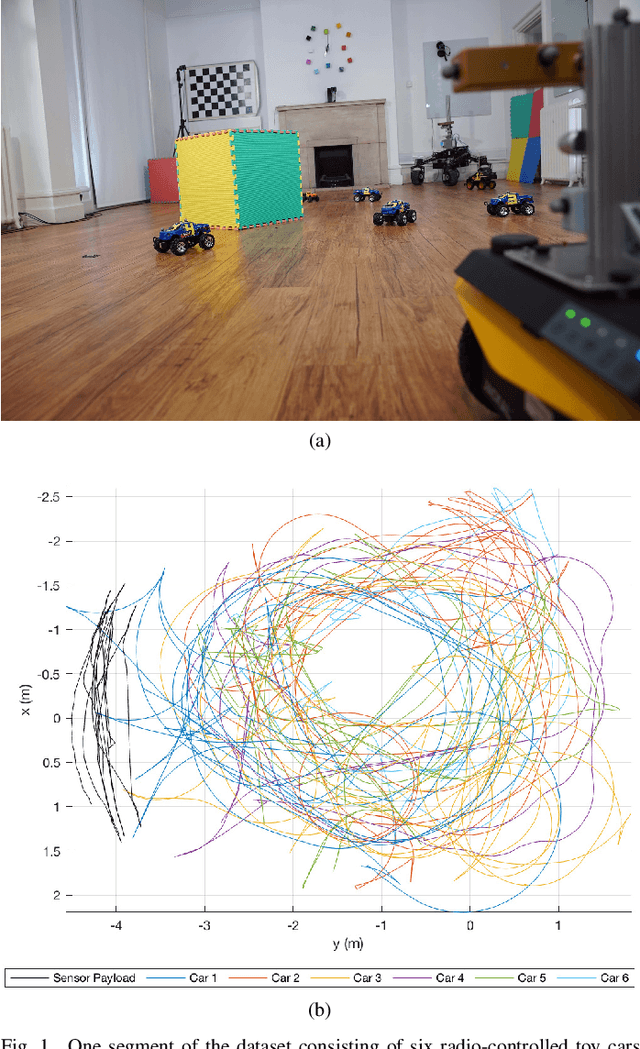
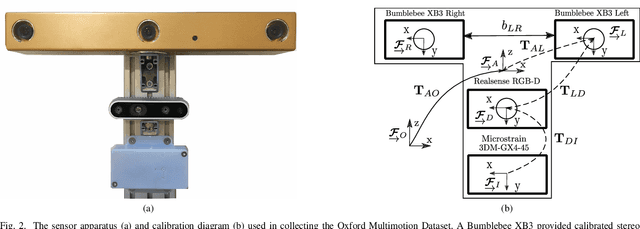
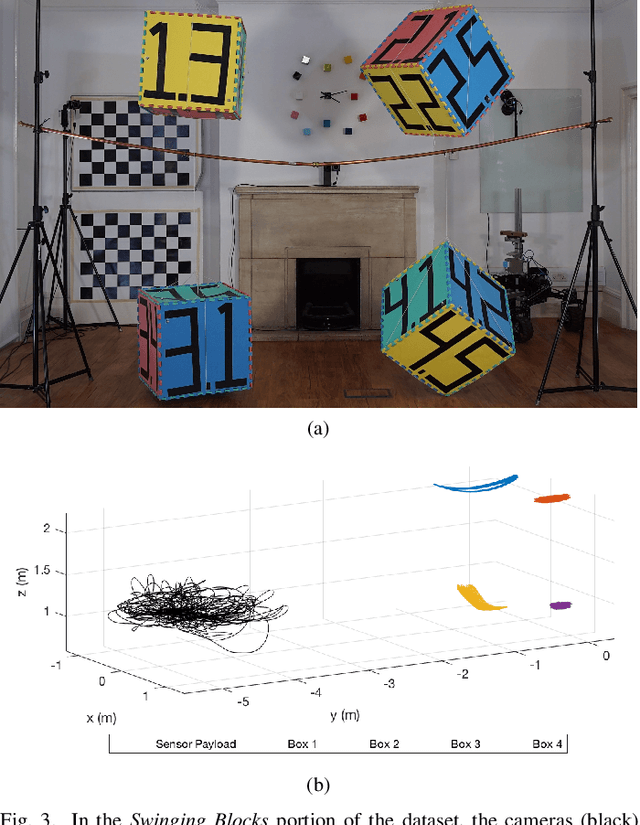
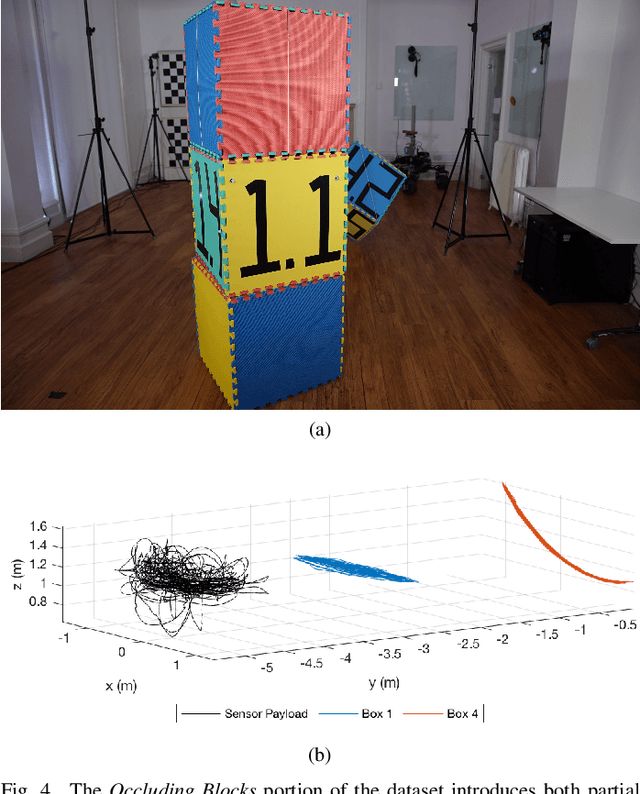
Datasets advance research by posing challenging new problems and providing standardized methods of algorithm comparison. High-quality datasets exist for many important problems in robotics and computer vision, including egomotion estimation and motion/scene segmentation, but not for techniques that estimate every motion in a scene. Metric evaluation of these multimotion estimation techniques requires datasets consisting of multiple, complex motions that also contain ground truth for every moving body. The Oxford Multimotion Dataset provides a number of multimotion estimation problems of varying complexity. It includes both complex problems that challenge existing algorithms as well as a number of simpler problems to support development. These include observations from both static and dynamic sensors, a varying number of moving bodies, and a variety of different 3D motions. It also provides a number of experiments designed to isolate specific challenges of the multimotion problem, including rotation about the optical axis and occlusion. In total, the Oxford Multimotion Dataset contains over 110 minutes of multimotion data consisting of stereo and RGB-D camera images, IMU data, and Vicon ground-truth trajectories. The dataset culminates in a complex toy car segment representative of many challenging real-world scenarios. This paper describes each experiment with a focus on its relevance to the multimotion estimation problem.
* To appear in IEEE Robotics and Automation Letters (RA-L). 8 Pages. 7 Figures. Video available at https://www.youtube.com/watch?v=zXaHEdiKxdA. Dataset available at https://robotic-esp.com/datasets/
Multimotion Visual Odometry (MVO): Simultaneous Estimation of Camera and Third-Party Motions
Aug 14, 2018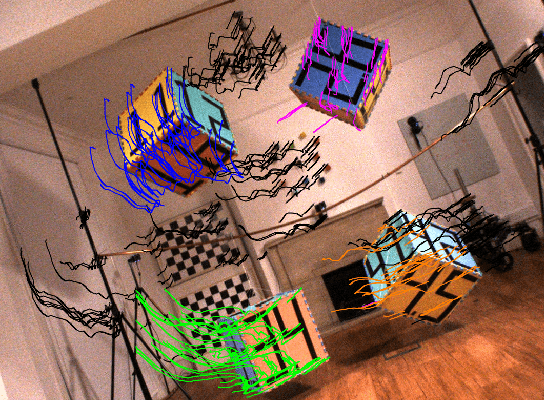
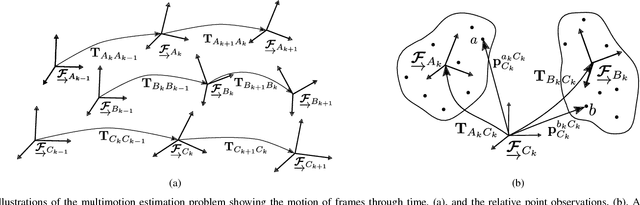
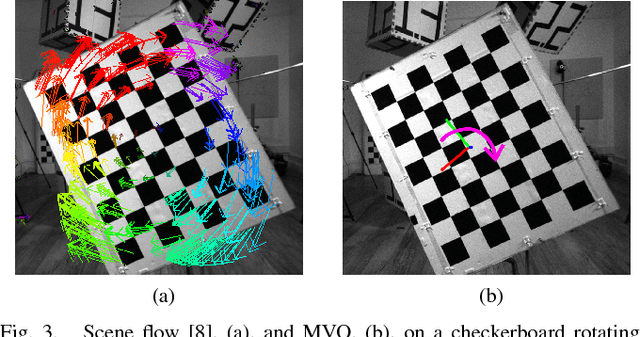
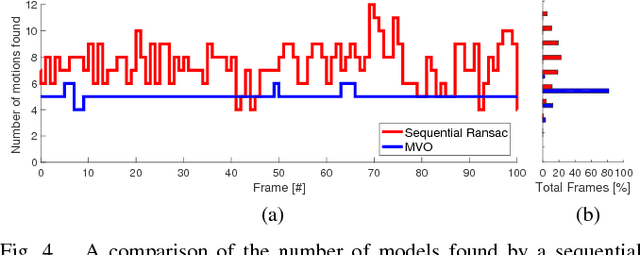
Estimating motion from images is a well-studied problem in computer vision and robotics. Previous work has developed techniques to estimate the motion of a moving camera in a largely static environment (e.g., visual odometry) and to segment or track motions in a dynamic scene using known camera motions (e.g., multiple object tracking). It is more challenging to estimate the unknown motion of the camera and the dynamic scene simultaneously. Most previous work requires a priori object models (e.g., tracking-by-detection), motion constraints (e.g., planar motion), or fails to estimate the full SE(3) motions of the scene (e.g., scene flow). While these approaches work well in specific application domains, they are not generalizable to unconstrained motions. This paper extends the traditional visual odometry (VO) pipeline to estimate the full SE(3) motion of both a stereo/RGB-D camera and the dynamic scene. This multimotion visual odometry (MVO) pipeline requires no a priori knowledge of the environment or the dynamic objects. Its performance is evaluated on a real-world dynamic dataset with ground truth for all motions from a motion capture system.
* This updated manuscript corrects the experimental results published in the proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).. 8 Pages. 7 Figures. Video available at https://www.youtube.com/watch?v=84tXCJOlj00
Informed Asymptotically Optimal Anytime Search
May 08, 2018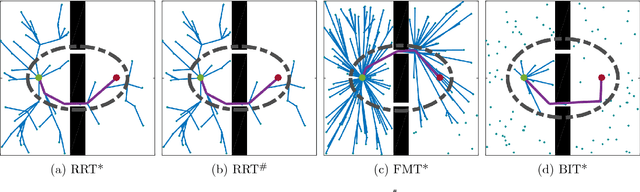
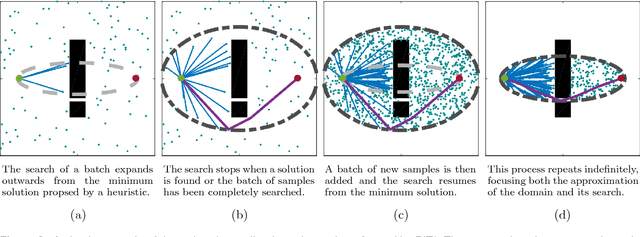
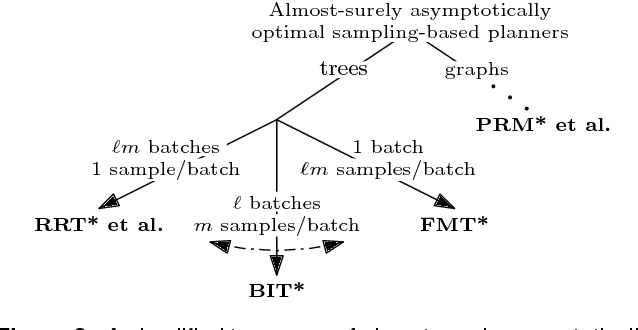
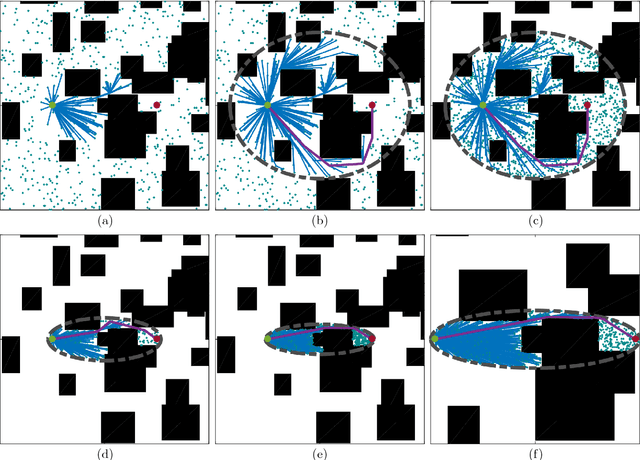
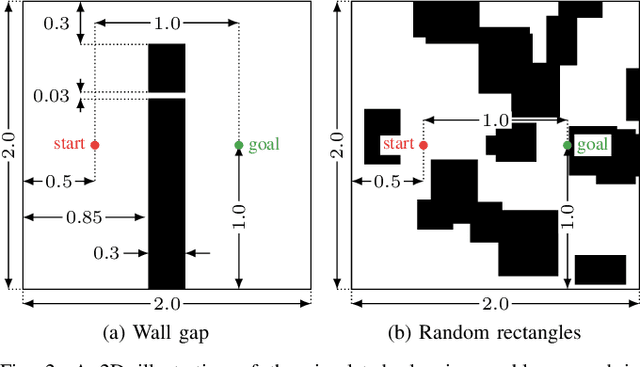
Path planning in robotics often requires finding high-quality solutions to continuously valued and/or high-dimensional problems. These problems are challenging and most planning algorithms instead solve simplified approximations. Popular approximations include graphs and random samples, as respectively used by informed graph-based searches and anytime sampling-based planners. Informed graph-based searches, such as A*, traditionally use heuristics to search a priori graphs in order of potential solution quality. This makes their search efficient but leaves their performance dependent on the chosen approximation. If its resolution is too low then they may not find a (suitable) solution but if it is too high then they may take a prohibitively long time to do so. Anytime sampling-based planners, such as RRT*, traditionally use random sampling to approximate the problem domain incrementally. This allows them to increase resolution until a suitable solution is found but makes their search dependent on the order of approximation. Arbitrary sequences of random samples expand the approximation in every direction and fill the problem domain but may be prohibitively inefficient at containing a solution. This paper unifies and extends these two approaches to develop Batch Informed Trees (BIT*), an informed, anytime sampling-based planner. BIT* solves continuous path planning problems efficiently by using sampling and heuristics to alternately approximate and search the problem domain. Its search is ordered by potential solution quality, as in A*, and its approximation improves indefinitely with additional computational time, as in RRT*. It is shown analytically to be almost-surely asymptotically optimal and experimentally to outperform existing sampling-based planners, especially on high-dimensional planning problems.
Surface Edge Explorer (SEE): Planning Next Best Views Directly from 3D Observations
Feb 23, 2018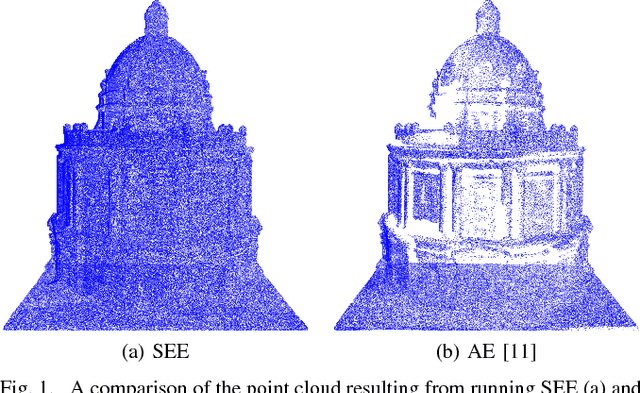
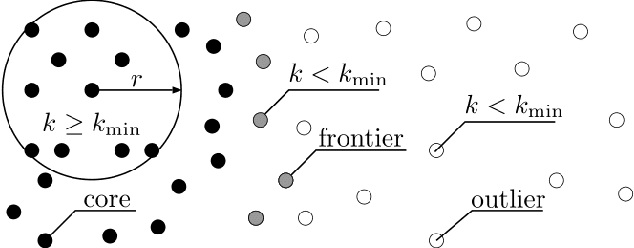
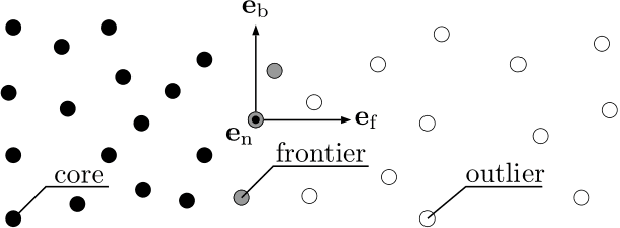
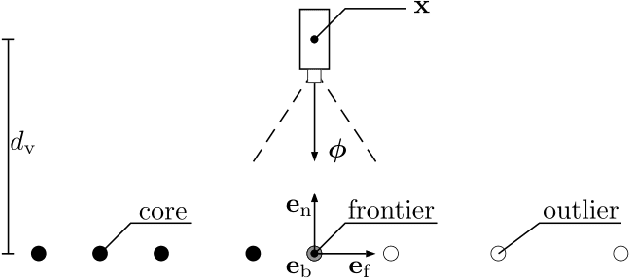
Surveying 3D scenes is a common task in robotics. Systems can do so autonomously by iteratively obtaining measurements. This process of planning observations to improve the model of a scene is called Next Best View (NBV) planning. NBV planning approaches often use either volumetric (e.g., voxel grids) or surface (e.g., triangulated meshes) representations. Volumetric approaches generalise well between scenes as they do not depend on surface geometry but do not scale to high-resolution models of large scenes. Surface representations can obtain high-resolution models at any scale but often require tuning of unintuitive parameters or multiple survey stages. This paper presents a scene-model-free NBV planning approach with a density representation. The Surface Edge Explorer (SEE) uses the density of current measurements to detect and explore observed surface boundaries. This approach is shown experimentally to provide better surface coverage in lower computation time than the evaluated state-of-the-art volumetric approaches while moving equivalent distances.
Batch Informed Trees (BIT*): Sampling-based Optimal Planning via the Heuristically Guided Search of Implicit Random Geometric Graphs
Aug 13, 2015



In this paper, we present Batch Informed Trees (BIT*), a planning algorithm based on unifying graph- and sampling-based planning techniques. By recognizing that a set of samples describes an implicit random geometric graph (RGG), we are able to combine the efficient ordered nature of graph-based techniques, such as A*, with the anytime scalability of sampling-based algorithms, such as Rapidly-exploring Random Trees (RRT). BIT* uses a heuristic to efficiently search a series of increasingly dense implicit RGGs while reusing previous information. It can be viewed as an extension of incremental graph-search techniques, such as Lifelong Planning A* (LPA*), to continuous problem domains as well as a generalization of existing sampling-based optimal planners. It is shown that it is probabilistically complete and asymptotically optimal. We demonstrate the utility of BIT* on simulated random worlds in $\mathbb{R}^2$ and $\mathbb{R}^8$ and manipulation problems on CMU's HERB, a 14-DOF two-armed robot. On these problems, BIT* finds better solutions faster than RRT, RRT*, Informed RRT*, and Fast Marching Trees (FMT*) with faster anytime convergence towards the optimum, especially in high dimensions.
* 8 Pages. 6 Figures. Video available at http://www.youtube.com/watch?v=TQIoCC48gp4