 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmergent Road Rules In Multi-Agent Driving Environments
Nov 21, 2020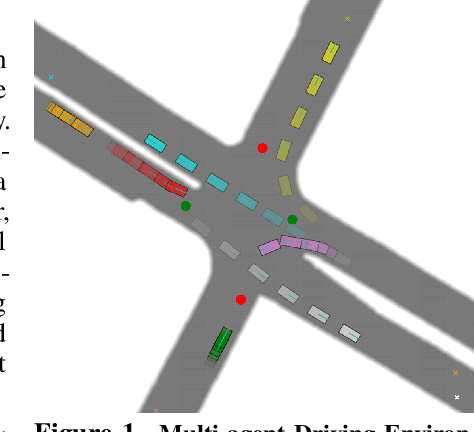

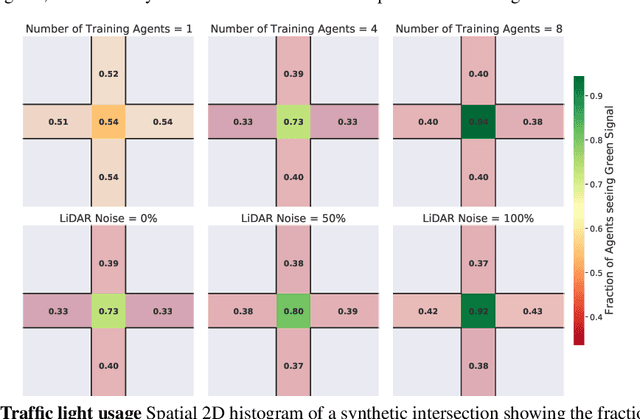
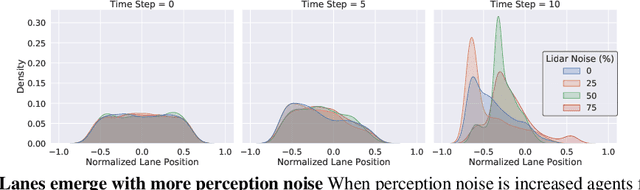
For autonomous vehicles to safely share the road with human drivers, autonomous vehicles must abide by specific "road rules" that human drivers have agreed to follow. "Road rules" include rules that drivers are required to follow by law -- such as the requirement that vehicles stop at red lights -- as well as more subtle social rules -- such as the implicit designation of fast lanes on the highway. In this paper, we provide empirical evidence that suggests that -- instead of hard-coding road rules into self-driving algorithms -- a scalable alternative may be to design multi-agent environments in which road rules emerge as optimal solutions to the problem of maximizing traffic flow. We analyze what ingredients in driving environments cause the emergence of these road rules and find that two crucial factors are noisy perception and agents' spatial density. We provide qualitative and quantitative evidence of the emergence of seven social driving behaviors, ranging from obeying traffic signals to following lanes, all of which emerge from training agents to drive quickly to destinations without colliding. Our results add empirical support for the social road rules that countries worldwide have agreed on for safe, efficient driving.
The efficacy of Neural Planning Metrics: A meta-analysis of PKL on nuScenes
Oct 24, 2020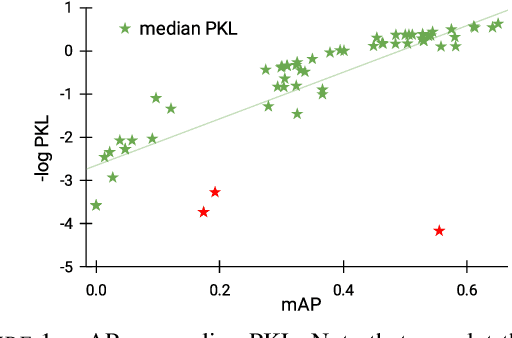
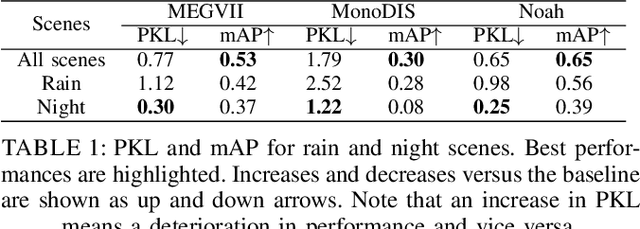
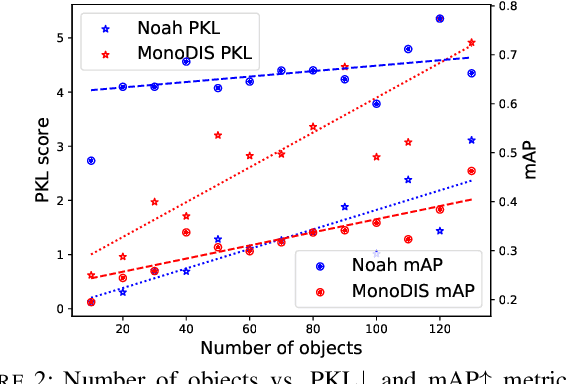
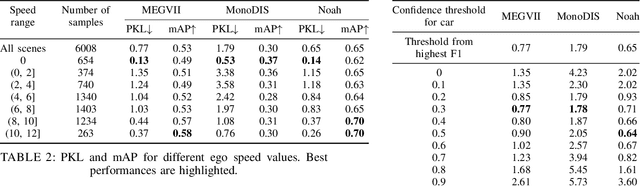
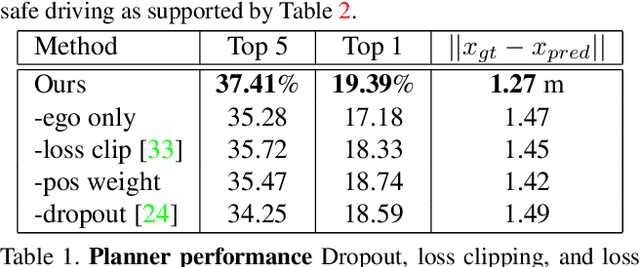
A high-performing object detection system plays a crucial role in autonomous driving (AD). The performance, typically evaluated in terms of mean Average Precision, does not take into account orientation and distance of the actors in the scene, which are important for the safe AD. It also ignores environmental context. Recently, Philion et al. proposed a neural planning metric (PKL), based on the KL divergence of a planner's trajectory and the groundtruth route, to accommodate these requirements. In this paper, we use this neural planning metric to score all submissions of the nuScenes detection challenge and analyze the results. We find that while somewhat correlated with mAP, the PKL metric shows different behavior to increased traffic density, ego velocity, road curvature and intersections. Finally, we propose ideas to extend the neural planning metric.
Lift, Splat, Shoot: Encoding Images From Arbitrary Camera Rigs by Implicitly Unprojecting to 3D
Aug 13, 2020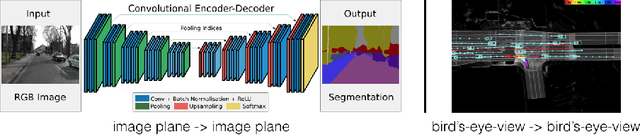
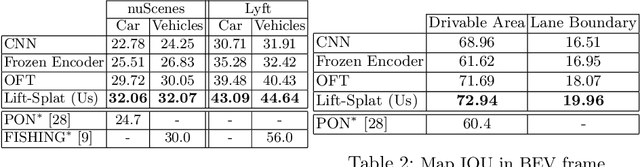
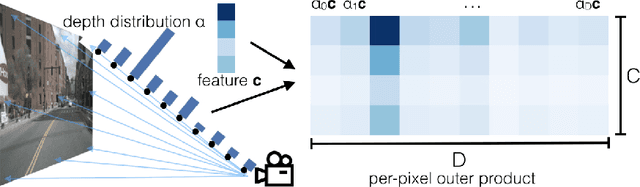
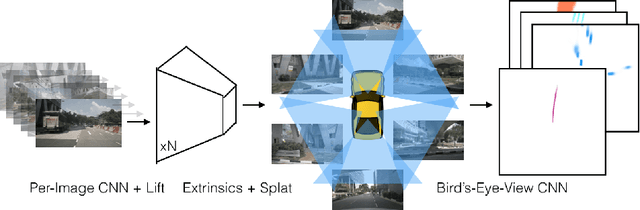
The goal of perception for autonomous vehicles is to extract semantic representations from multiple sensors and fuse these representations into a single "bird's-eye-view" coordinate frame for consumption by motion planning. We propose a new end-to-end architecture that directly extracts a bird's-eye-view representation of a scene given image data from an arbitrary number of cameras. The core idea behind our approach is to "lift" each image individually into a frustum of features for each camera, then "splat" all frustums into a rasterized bird's-eye-view grid. By training on the entire camera rig, we provide evidence that our model is able to learn not only how to represent images but how to fuse predictions from all cameras into a single cohesive representation of the scene while being robust to calibration error. On standard bird's-eye-view tasks such as object segmentation and map segmentation, our model outperforms all baselines and prior work. In pursuit of the goal of learning dense representations for motion planning, we show that the representations inferred by our model enable interpretable end-to-end motion planning by "shooting" template trajectories into a bird's-eye-view cost map output by our network. We benchmark our approach against models that use oracle depth from lidar. Project page with code: https://nv-tlabs.github.io/lift-splat-shoot .
Learning to Simulate Dynamic Environments with GameGAN
May 25, 2020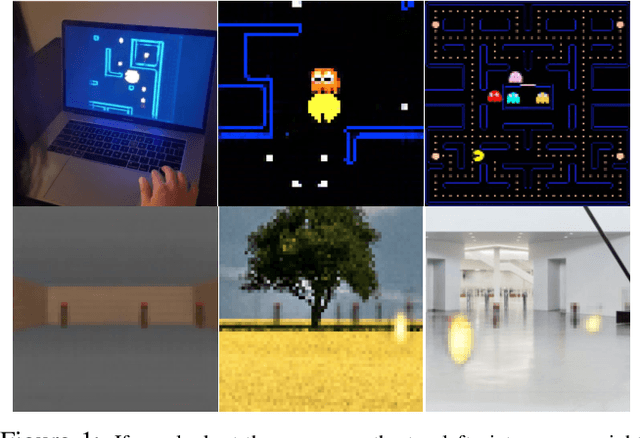
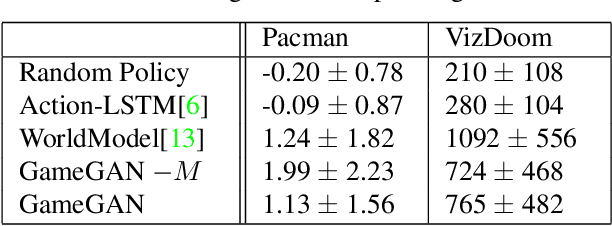
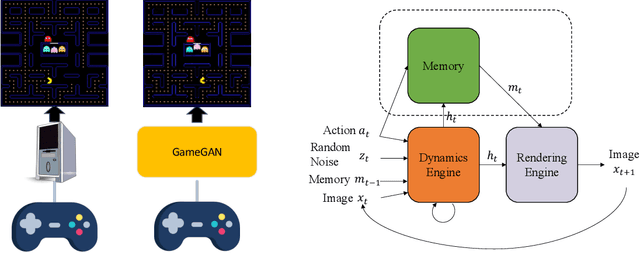
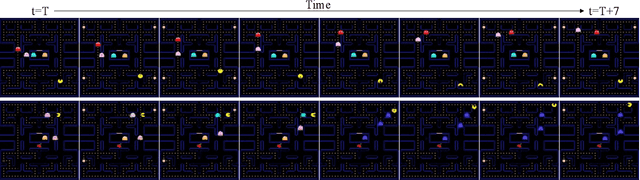
Simulation is a crucial component of any robotic system. In order to simulate correctly, we need to write complex rules of the environment: how dynamic agents behave, and how the actions of each of the agents affect the behavior of others. In this paper, we aim to learn a simulator by simply watching an agent interact with an environment. We focus on graphics games as a proxy of the real environment. We introduce GameGAN, a generative model that learns to visually imitate a desired game by ingesting screenplay and keyboard actions during training. Given a key pressed by the agent, GameGAN "renders" the next screen using a carefully designed generative adversarial network. Our approach offers key advantages over existing work: we design a memory module that builds an internal map of the environment, allowing for the agent to return to previously visited locations with high visual consistency. In addition, GameGAN is able to disentangle static and dynamic components within an image making the behavior of the model more interpretable, and relevant for downstream tasks that require explicit reasoning over dynamic elements. This enables many interesting applications such as swapping different components of the game to build new games that do not exist.
Learning to Evaluate Perception Models Using Planner-Centric Metrics
Apr 19, 2020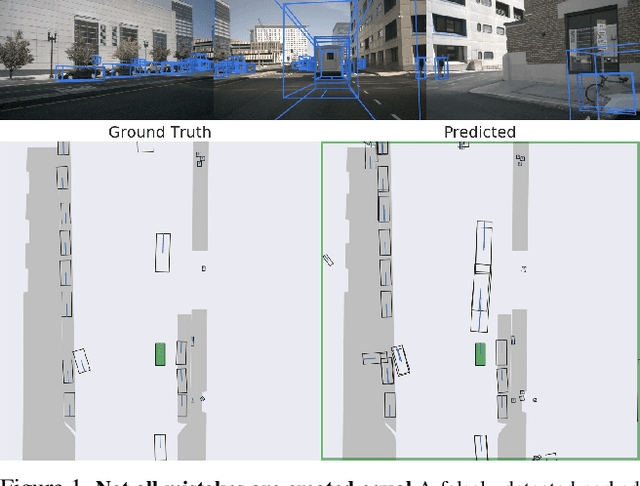
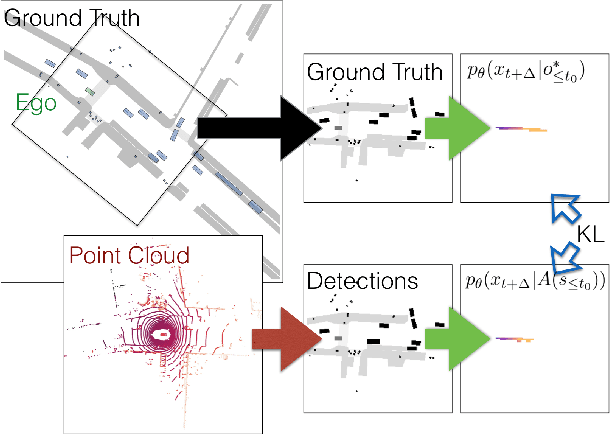
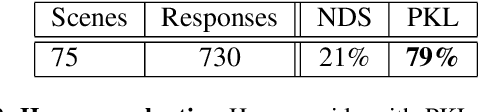
Variants of accuracy and precision are the gold-standard by which the computer vision community measures progress of perception algorithms. One reason for the ubiquity of these metrics is that they are largely task-agnostic; we in general seek to detect zero false negatives or positives. The downside of these metrics is that, at worst, they penalize all incorrect detections equally without conditioning on the task or scene, and at best, heuristics need to be chosen to ensure that different mistakes count differently. In this paper, we propose a principled metric for 3D object detection specifically for the task of self-driving. The core idea behind our metric is to isolate the task of object detection and measure the impact the produced detections would induce on the downstream task of driving. Without hand-designing it to, we find that our metric penalizes many of the mistakes that other metrics penalize by design. In addition, our metric downweighs detections based on additional factors such as distance from a detection to the ego car and the speed of the detection in intuitive ways that other detection metrics do not. For human evaluation, we generate scenes in which standard metrics and our metric disagree and find that humans side with our metric 79% of the time. Our project page including an evaluation server can be found at https://nv-tlabs.github.io/detection-relevance.
FastDraw: Addressing the Long Tail of Lane Detection by Adapting a Sequential Prediction Network
May 14, 2019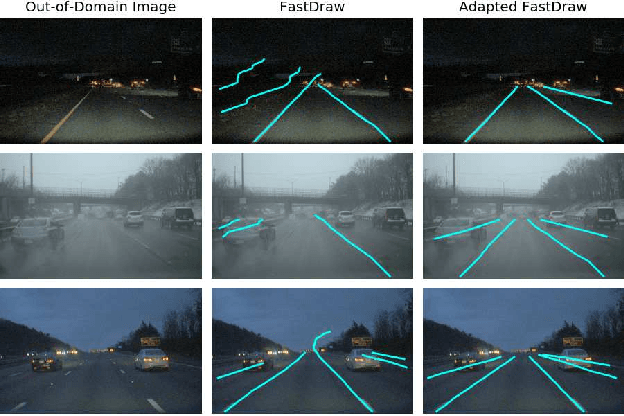
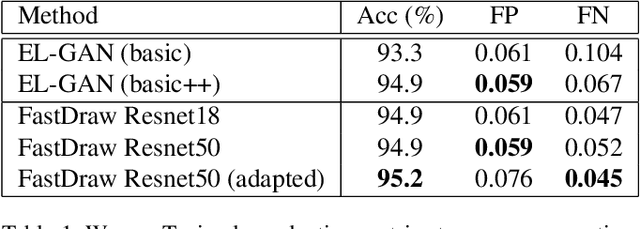
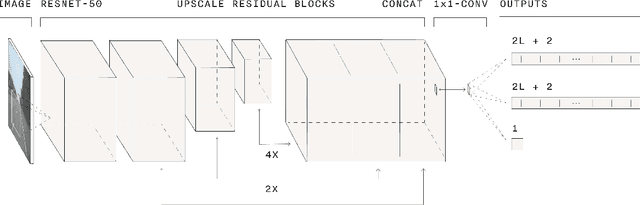
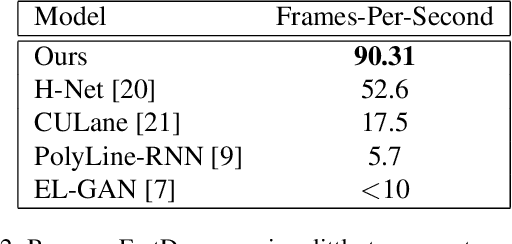
The search for predictive models that generalize to the long tail of sensor inputs is the central difficulty when developing data-driven models for autonomous vehicles. In this paper, we use lane detection to study modeling and training techniques that yield better performance on real world test drives. On the modeling side, we introduce a novel fully convolutional model of lane detection that learns to decode lane structures instead of delegating structure inference to post-processing. In contrast to previous works, our convolutional decoder is able to represent an arbitrary number of lanes per image, preserves the polyline representation of lanes without reducing lanes to polynomials, and draws lanes iteratively without requiring the computational and temporal complexity of recurrent neural networks. Because our model includes an estimate of the joint distribution of neighboring pixels belonging to the same lane, our formulation includes a natural and computationally cheap definition of uncertainty. On the training side, we demonstrate a simple yet effective approach to adapt the model to new environments using unsupervised style transfer. By training FastDraw to make predictions of lane structure that are invariant to low-level stylistic differences between images, we achieve strong performance at test time in weather and lighting conditions that deviate substantially from those of the annotated datasets that are publicly available. We quantitatively evaluate our approach on the CVPR 2017 Tusimple lane marking challenge, difficult CULane datasets, and a small labeled dataset of our own and achieve competitive accuracy while running at 90 FPS.