 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Role of Touch: Towards Optimal Tactile Sensing Distribution in Anthropomorphic Hands for Dexterous In-Hand Manipulation
Sep 18, 2025In-hand manipulation tasks, particularly in human-inspired robotic systems, must rely on distributed tactile sensing to achieve precise control across a wide variety of tasks. However, the optimal configuration of this network of sensors is a complex problem, and while the fingertips are a common choice for placing sensors, the contribution of tactile information from other regions of the hand is often overlooked. This work investigates the impact of tactile feedback from various regions of the fingers and palm in performing in-hand object reorientation tasks. We analyze how sensory feedback from different parts of the hand influences the robustness of deep reinforcement learning control policies and investigate the relationship between object characteristics and optimal sensor placement. We identify which tactile sensing configurations contribute to improving the efficiency and accuracy of manipulation. Our results provide valuable insights for the design and use of anthropomorphic end-effectors with enhanced manipulation capabilities.
SENSORIMOTOR GRAPH: Action-Conditioned Graph Neural Network for Learning Robotic Soft Hand Dynamics
Jul 18, 2021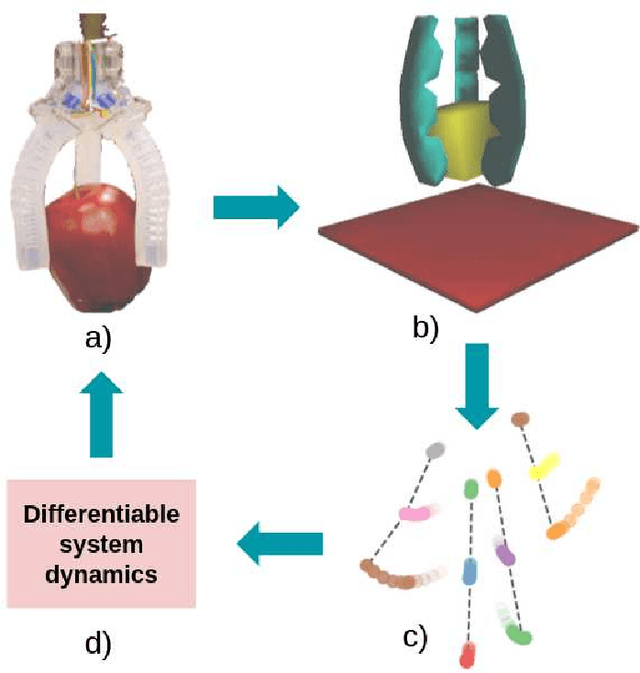
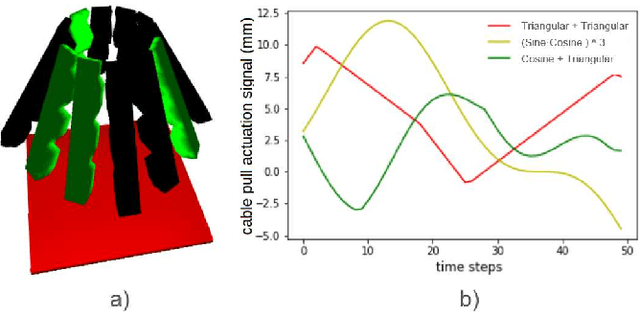
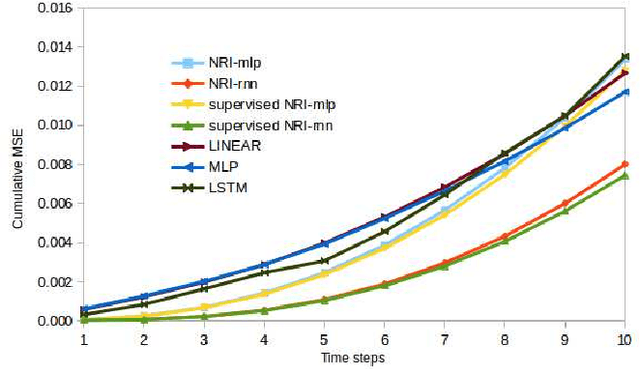
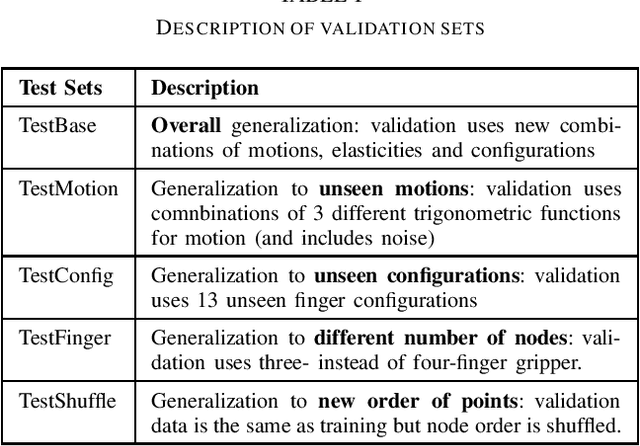
Soft robotics is a thriving branch of robotics which takes inspiration from nature and uses affordable flexible materials to design adaptable non-rigid robots. However, their flexible behavior makes these robots hard to model, which is essential for a precise actuation and for optimal control. For system modelling, learning-based approaches have demonstrated good results, yet they fail to consider the physical structure underlying the system as an inductive prior. In this work, we take inspiration from sensorimotor learning, and apply a Graph Neural Network to the problem of modelling a non-rigid kinematic chain (i.e. a robotic soft hand) taking advantage of two key properties: 1) the system is compositional, that is, it is composed of simple interacting parts connected by edges, 2) it is order invariant, i.e. only the structure of the system is relevant for predicting future trajectories. We denote our model as the 'Sensorimotor Graph' since it learns the system connectivity from observation and uses it for dynamics prediction. We validate our model in different scenarios and show that it outperforms the non-structured baselines in dynamics prediction while being more robust to configurational variations, tracking errors or node failures.