 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEGTR-Review: Efficient Evidence-Grounded Scientific Peer Review Generation via Multi-Agent Teacher Distillation
Jun 04, 2026Scientific peer review generation has attracted increasing attention for reducing reviewing burdens and providing timely feedback. However, existing Large Language Model (LLM)-based methods often produce generic comments with insufficient evidence support and weak source traceability, while complex multi-agent systems incur high inference costs. To address these challenges, we propose EGTR-Review, an Evidence-Grounded and Traceable Review Generation framework via Multi-Agent Teacher Distillation. EGTR-Review first constructs a multi-agent teacher that performs structure-aware paper decomposition, key-element extraction, external scholarly evidence retrieval, evidence-state labeling, verification reasoning, and review synthesis. It then distills both intermediate reasoning trajectories and final review comments into a lightweight student model through task-prefix-driven multi-task learning. An evidence-weighted objective further reduces the influence of weak, missing, or non-verifiable supervision. Experiments on public peer-review datasets show that EGTR-Review (Student) outperforms strong prompt-based, fine-tuned, and structured/agentic baselines across automatic metrics, LLM-as-Judge evaluation, and human evaluation, while maintaining strong factual grounding and source traceability with substantially lower token consumption and inference time. Our code, prompts, configurations, and sample data are available on GitHub.
Consensus-Based Distributed Nonlinear Filtering with Kernel Mean Embedding
Dec 04, 2023This paper proposes a consensus-based distributed nonlinear filter with kernel mean embedding (KME). This fills with gap of posterior density approximation with KME for distributed nonlinear dynamic systems. To approximate the posterior density, the system state is embedded into a higher-dimensional reproducing kernel Hilbert space (RKHS), and then the nonlinear measurement function is linearly converted. As a result, an update rule of KME of posterior distribution is established in the RKHS. To show the proposed distributed filter being capable of achieving the centralized estimation accuracy, a centralized filter, serving as an extension of the standard Kalman filter in the state space to the RKHS, is developed first. Benefited from the KME, the proposed distributed filter converges to the centralized one while maintaining the distributed pattern. Two examples are introduced to demonstrate the effectiveness of the developed filters in target tracking scenarios including nearly constantly moving target and turning target, respectively, with bearing-only, range and bearing measurements.
Are We There Yet? Evaluating State-of-the-Art Neural Network based Geoparsers Using EUPEG as a Benchmarking Platform
Jul 15, 2020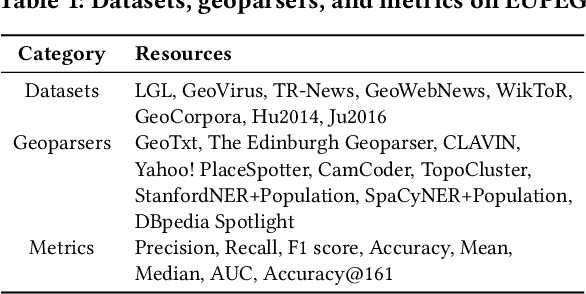
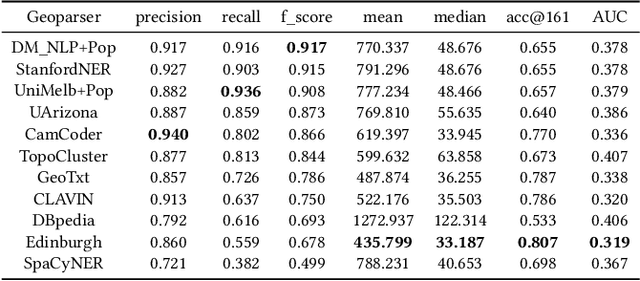
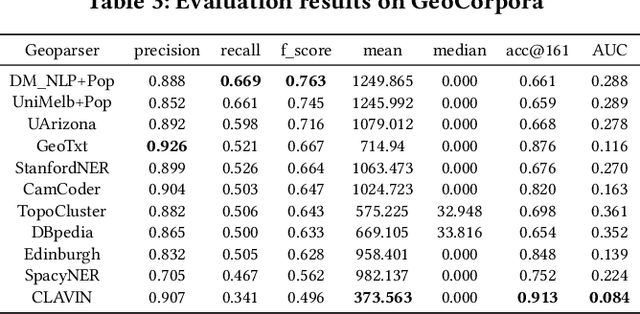
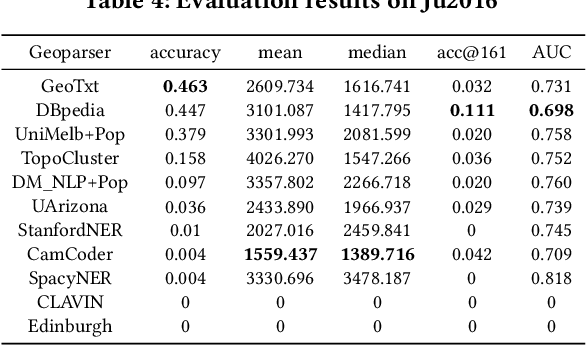
Geoparsing is an important task in geographic information retrieval. A geoparsing system, known as a geoparser, takes some texts as the input and outputs the recognized place mentions and their location coordinates. In June 2019, a geoparsing competition, Toponym Resolution in Scientific Papers, was held as one of the SemEval 2019 tasks. The winning teams developed neural network based geoparsers that achieved outstanding performances (over 90% precision, recall, and F1 score for toponym recognition). This exciting result brings the question "are we there yet?", namely have we achieved high enough performances to possibly consider the problem of geoparsing as solved? One limitation of this competition is that the developed geoparsers were tested on only one dataset which has 45 research articles collected from the particular domain of Bio-medicine. It is known that the same geoparser can have very different performances on different datasets. Thus, this work performs a systematic evaluation of these state-of-the-art geoparsers using our recently developed benchmarking platform EUPEG that has eight annotated datasets, nine baseline geoparsers, and eight performance metrics. The evaluation result suggests that these new geoparsers indeed improve the performances of geoparsing on multiple datasets although some challenges remain.