 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Transferable Legged Mobile Manipulation Framework Based on Disturbance Predictive Control
Mar 02, 2022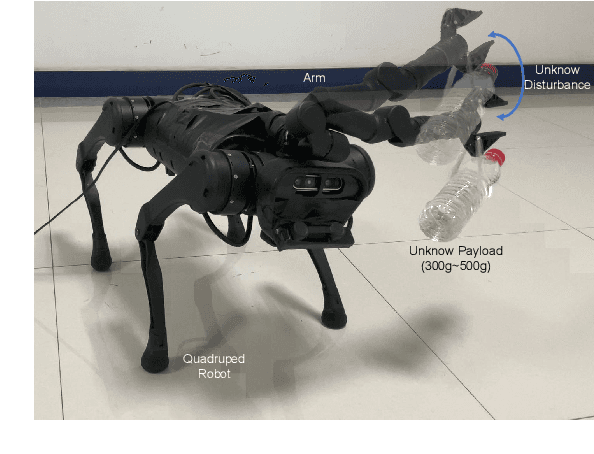
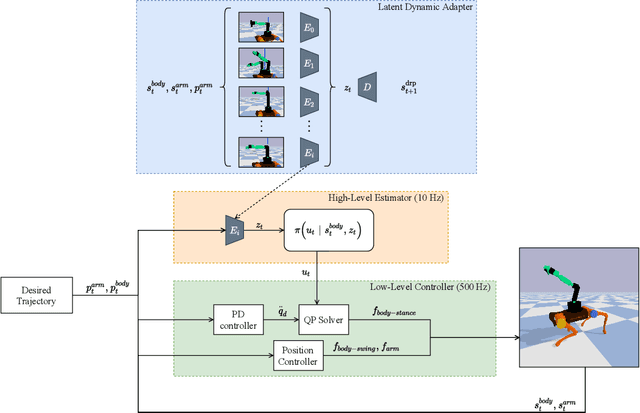
Due to their ability to adapt to different terrains, quadruped robots have drawn much attention in the research field of robot learning. Legged mobile manipulation, where a quadruped robot is equipped with a robotic arm, can greatly enhance the performance of the robot in diverse manipulation tasks. Several prior works have investigated legged mobile manipulation from the viewpoint of control theory. However, modeling a unified structure for various robotic arms and quadruped robots is a challenging task. In this paper, we propose a unified framework disturbance predictive control where a reinforcement learning scheme with a latent dynamic adapter is embedded into our proposed low-level controller. Our method can adapt well to various types of robotic arms with a few random motion samples and the experimental results demonstrate the effectiveness of our method.