 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBiCoR-Seg: Bidirectional Co-Refinement Framework for High-Resolution Remote Sensing Image Segmentation
Dec 23, 2025High-resolution remote sensing image semantic segmentation (HRSS) is a fundamental yet critical task in the field of Earth observation. However, it has long faced the challenges of high inter-class similarity and large intra-class variability. Existing approaches often struggle to effectively inject abstract yet strongly discriminative semantic knowledge into pixel-level feature learning, leading to blurred boundaries and class confusion in complex scenes. To address these challenges, we propose Bidirectional Co-Refinement Framework for HRSS (BiCoR-Seg). Specifically, we design a Heatmap-driven Bidirectional Information Synergy Module (HBIS), which establishes a bidirectional information flow between feature maps and class embeddings by generating class-level heatmaps. Based on HBIS, we further introduce a hierarchical supervision strategy, where the interpretable heatmaps generated by each HBIS module are directly utilized as low-resolution segmentation predictions for supervision, thereby enhancing the discriminative capacity of shallow features. In addition, to further improve the discriminability of the embedding representations, we propose a cross-layer class embedding Fisher Discriminative Loss to enforce intra-class compactness and enlarge inter-class separability. Extensive experiments on the LoveDA, Vaihingen, and Potsdam datasets demonstrate that BiCoR-Seg achieves outstanding segmentation performance while offering stronger interpretability. The released code is available at https://github.com/ShiJinghao566/BiCoR-Seg.
Explainable Convolutional Networks for Crater Detection and Lunar Landing Navigation
Aug 24, 2024



The Lunar landing has drawn great interest in lunar exploration in recent years, and autonomous lunar landing navigation is fundamental to this task. AI is expected to play a critical role in autonomous and intelligent space missions, yet human experts question the reliability of AI solutions. Thus, the \gls{xai} for vision-based lunar landing is studied in this paper, aiming at providing transparent and understandable predictions for intelligent lunar landing. Attention-based Darknet53 is proposed as the feature extraction structure. For crater detection and navigation tasks, attention-based YOLOv3 and attention-Darknet53-LSTM are presented respectively. The experimental results show that the offered networks provide competitive performance on relative crater detection and pose estimation during the lunar landing. The explainability of the provided networks is achieved by introducing an attention mechanism into the network during model building. Moreover, the PCC is utilised to quantitively evaluate the explainability of the proposed networks, with the findings showing the functions of various convolutional layers in the network.
A Generalized Framework with Adaptive Weighted Soft-Margin for Imbalanced SVM Classification
Mar 13, 2024



Category imbalance is one of the most popular and important issues in the domain of classification. In this paper, we present a new generalized framework with Adaptive Weight function for soft-margin Weighted SVM (AW-WSVM), which aims to enhance the issue of imbalance and outlier sensitivity in standard support vector machine (SVM) for classifying two-class data. The weight coefficient is introduced into the unconstrained soft-margin support vector machines, and the sample weights are updated before each training. The Adaptive Weight function (AW function) is constructed from the distance between the samples and the decision hyperplane, assigning different weights to each sample. A weight update method is proposed, taking into account the proximity of the support vectors to the decision hyperplane. Before training, the weights of the corresponding samples are initialized according to different categories. Subsequently, the samples close to the decision hyperplane are identified and assigned more weights. At the same time, lower weights are assigned to samples that are far from the decision hyperplane. Furthermore, we also put forward an effective way to eliminate noise. To evaluate the strength of the proposed generalized framework, we conducted experiments on standard datasets and emotion classification datasets with different imbalanced ratios (IR). The experimental results prove that the proposed generalized framework outperforms in terms of accuracy, recall metrics and G-mean, validating the effectiveness of the weighted strategy provided in this paper in enhancing support vector machines.
Deep Learning-based Spacecraft Relative Navigation Methods: A Survey
Aug 19, 2021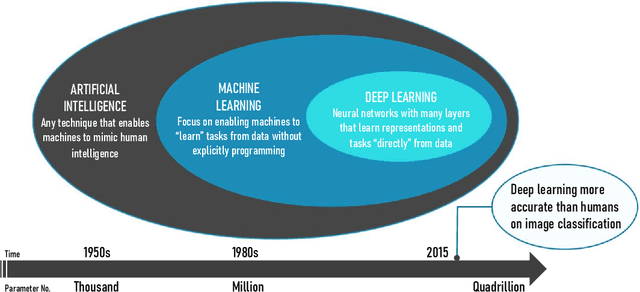
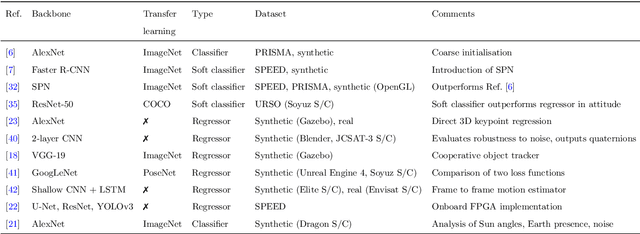
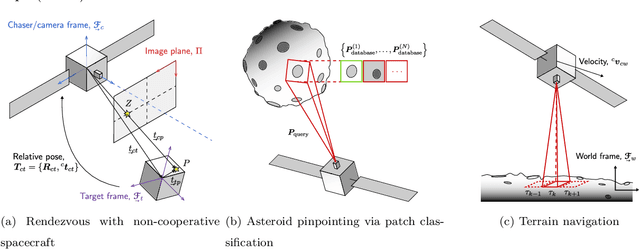
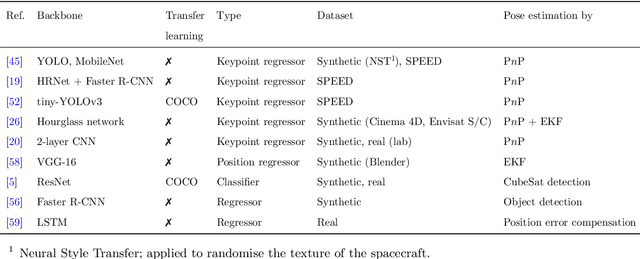
Autonomous spacecraft relative navigation technology has been planned for and applied to many famous space missions. The development of on-board electronics systems has enabled the use of vision-based and LiDAR-based methods to achieve better performances. Meanwhile, deep learning has reached great success in different areas, especially in computer vision, which has also attracted the attention of space researchers. However, spacecraft navigation differs from ground tasks due to high reliability requirements but lack of large datasets. This survey aims to systematically investigate the current deep learning-based autonomous spacecraft relative navigation methods, focusing on concrete orbital applications such as spacecraft rendezvous and landing on small bodies or the Moon. The fundamental characteristics, primary motivations, and contributions of deep learning-based relative navigation algorithms are first summarised from three perspectives of spacecraft rendezvous, asteroid exploration, and terrain navigation. Furthermore, popular visual tracking benchmarks and their respective properties are compared and summarised. Finally, potential applications are discussed, along with expected impediments.