 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantifying and Bridging the Fidelity Gap: A Decisive-Feature Approach to Comparing Synthetic and Real Imagery
Dec 18, 2025Virtual testing using synthetic data has become a cornerstone of autonomous vehicle (AV) safety assurance. Despite progress in improving visual realism through advanced simulators and generative AI, recent studies reveal that pixel-level fidelity alone does not ensure reliable transfer from simulation to the real world. What truly matters is whether the system-under-test (SUT) bases its decisions on the same causal evidence in both real and simulated environments - not just whether images "look real" to humans. This paper addresses the lack of such a behavior-grounded fidelity measure by introducing Decisive Feature Fidelity (DFF), a new SUT-specific metric that extends the existing fidelity spectrum to capture mechanism parity - the agreement in causal evidence underlying the SUT's decisions across domains. DFF leverages explainable-AI (XAI) methods to identify and compare the decisive features driving the SUT's outputs for matched real-synthetic pairs. We further propose practical estimators based on counterfactual explanations, along with a DFF-guided calibration scheme to enhance simulator fidelity. Experiments on 2126 matched KITTI-VirtualKITTI2 pairs demonstrate that DFF reveals discrepancies overlooked by conventional output-value fidelity. Furthermore, results show that DFF-guided calibration improves decisive-feature and input-level fidelity without sacrificing output value fidelity across diverse SUTs.
Scenario Parameter Generation Method and Scenario Representativeness Metric for Scenario-Based Assessment of Automated Vehicles
Feb 24, 2022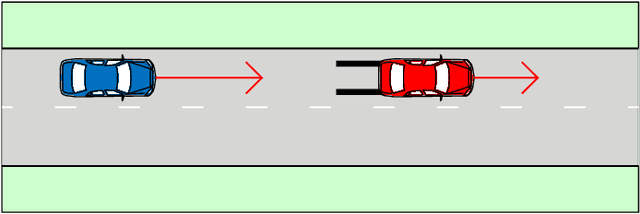
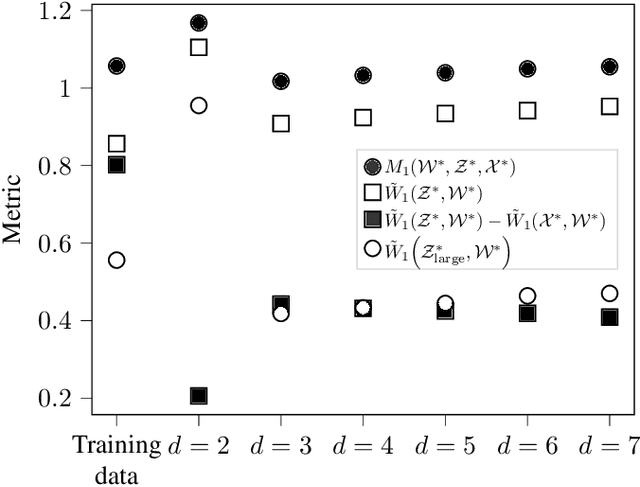
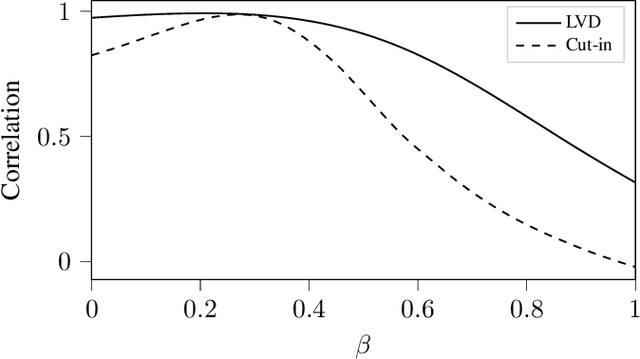
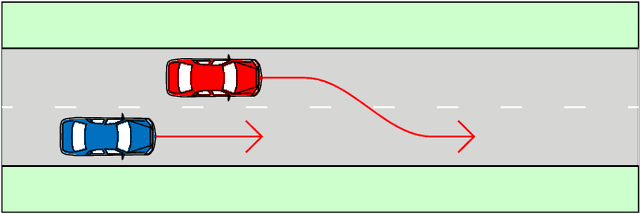
The development of assessment methods for the performance of Automated Vehicles (AVs) is essential to enable the deployment of automated driving technologies, due to the complex operational domain of AVs. One candidate is scenario-based assessment, in which test cases are derived from real-world road traffic scenarios obtained from driving data. Because of the high variety of the possible scenarios, using only observed scenarios for the assessment is not sufficient. Therefore, methods for generating additional scenarios are necessary. Our contribution is twofold. First, we propose a method to determine the parameters that describe the scenarios to a sufficient degree without relying on strong assumptions on the parameters that characterize the scenarios. By estimating the probability density function (pdf) of these parameters, realistic parameter values can be generated. Second, we present the Scenario Representativeness (SR) metric based on the Wasserstein distance, which quantifies to what extent the scenarios with the generated parameter values are representative of real-world scenarios while covering the actual variety found in the real-world scenarios. A comparison of our proposed method with methods relying on assumptions of the scenario parametrization and pdf estimation shows that the proposed method can automatically determine the optimal scenario parametrization and pdf estimation. Furthermore, we demonstrate that our SR metric can be used to choose the (number of) parameters that best describe a scenario. The presented method is promising, because the parameterization and pdf estimation can directly be applied to already available importance sampling strategies for accelerating the evaluation of AVs.