 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAMP2026: A Multi-Platform Marine Robotics Dataset for Tracking and Mapping
Mar 04, 2026Marine environments present significant challenges for perception and autonomy due to dynamic surfaces, limited visibility, and complex interactions between aerial, surface, and submerged sensing modalities. This paper introduces the Aerial Marine Perception Dataset (AMP2026), a multi-platform marine robotics dataset collected across multiple field deployments designed to support research in two primary areas: multi-view tracking and marine environment mapping. The dataset includes synchronized data from aerial drones, boat-mounted cameras, and submerged robotic platforms, along with associated localization and telemetry information. The goal of this work is to provide a publicly available dataset enabling research in marine perception and multi-robot observation scenarios. This paper describes the data collection methodology, sensor configurations, dataset organization, and intended research tasks supported by the dataset.
Schur-MI: Fast Mutual Information for Robotic Information Gathering
Feb 12, 2026Mutual information (MI) is a principled and widely used objective for robotic information gathering (RIG), providing strong theoretical guarantees for sensor placement (SP) and informative path planning (IPP). However, its high computational cost, dominated by repeated log-determinant evaluations, has limited its use in real-time planning. This letter presents Schur-MI, a Gaussian process (GP) MI formulation that (i) leverages the iterative structure of RIG to precompute and reuse expensive intermediate quantities across planning steps, and (ii) uses a Schur-complement factorization to avoid large determinant computations. Together, these methods reduce the per-evaluation cost of MI from $\mathcal{O}(|\mathcal{V}|^3)$ to $\mathcal{O}(|\mathcal{A}|^3)$, where $\mathcal{V}$ and $\mathcal{A}$ denote the candidate and selected sensing locations, respectively. Experiments on real-world bathymetry datasets show that Schur-MI achieves up to a $12.7\times$ speedup over the standard MI formulation. Field trials with an autonomous surface vehicle (ASV) performing adaptive IPP further validate its practicality. By making MI computation tractable for online planning, Schur-MI helps bridge the gap between information-theoretic objectives and real-time robotic exploration.
Informative Path Planning with Guaranteed Estimation Uncertainty
Feb 05, 2026Environmental monitoring robots often need to reconstruct spatial fields (e.g., salinity, temperature, bathymetry) under tight distance and energy constraints. Classical boustrophedon lawnmower surveys provide geometric coverage guarantees but can waste effort by oversampling predictable regions. In contrast, informative path planning (IPP) methods leverage spatial correlations to reduce oversampling, yet typically offer no guarantees on reconstruction quality. This paper bridges these approaches by addressing informative path planning with guaranteed estimation uncertainty: computing the shortest path whose measurements ensure that the Gaussian-process (GP) posterior variance -- an intrinsic uncertainty measure that lower-bounds the mean-squared prediction error under the GP model -- falls below a user-specified threshold over the monitoring region. We propose a three-stage approach: (i) learn a GP model from available prior information; (ii) transform the learned GP kernel into binary coverage maps for each candidate sensing location, indicating which locations' uncertainty can be reduced below a specified target; and (iii) plan a near-shortest route whose combined coverage satisfies the global uncertainty constraint. To address heterogeneous phenomena, we incorporate a nonstationary kernel that captures spatially varying correlation structure, and we accommodate non-convex environments with obstacles. Algorithmically, we present methods with provable approximation guarantees for sensing-location selection and for the joint selection-and-routing problem under a travel budget. Experiments on real-world topographic data show that our planners meet the uncertainty target using fewer sensing locations and shorter travel distances than a recent baseline, and field experiments with bathymetry-mapping autonomous surface and underwater vehicles demonstrate real-world feasibility.
Low-Cost Underwater In-Pipe Centering and Inspection Using a Minimal-Sensing Robot
Feb 05, 2026Autonomous underwater inspection of submerged pipelines is challenging due to confined geometries, turbidity, and the scarcity of reliable localization cues. This paper presents a minimal-sensing strategy that enables a free-swimming underwater robot to center itself and traverse a flooded pipe of known radius using only an IMU, a pressure sensor, and two sonars: a downward-facing single-beam sonar and a rotating 360 degree sonar. We introduce a computationally efficient method for extracting range estimates from single-beam sonar intensity data, enabling reliable wall detection in noisy and reverberant conditions. A closed-form geometric model leverages the two sonar ranges to estimate the pipe center, and an adaptive, confidence-weighted proportional-derivative (PD) controller maintains alignment during traversal. The system requires no Doppler velocity log, external tracking, or complex multi-sensor arrays. Experiments in a submerged 46 cm-diameter pipe using a Blue Robotics BlueROV2 heavy remotely operated vehicle demonstrate stable centering and successful full-pipe traversal despite ambient flow and structural deformations. These results show that reliable in-pipe navigation and inspection can be achieved with a lightweight, computationally efficient sensing and processing architecture, advancing the practicality of autonomous underwater inspection in confined environments.
Ensembles of Many Diverse Weak Defenses can be Strong: Defending Deep Neural Networks Against Adversarial Attacks
Jan 02, 2020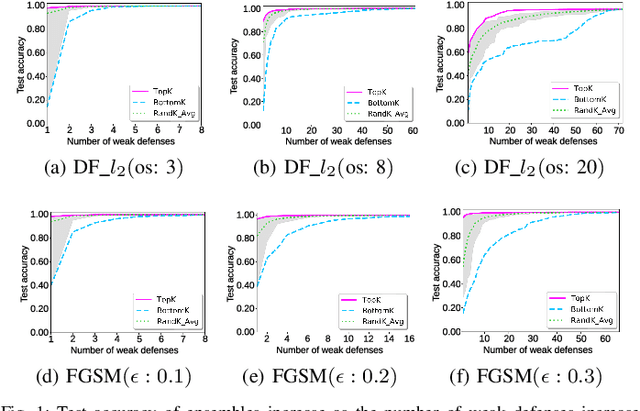
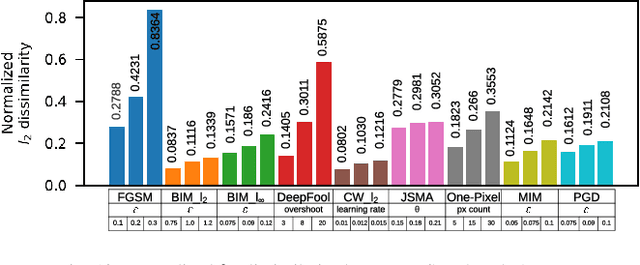
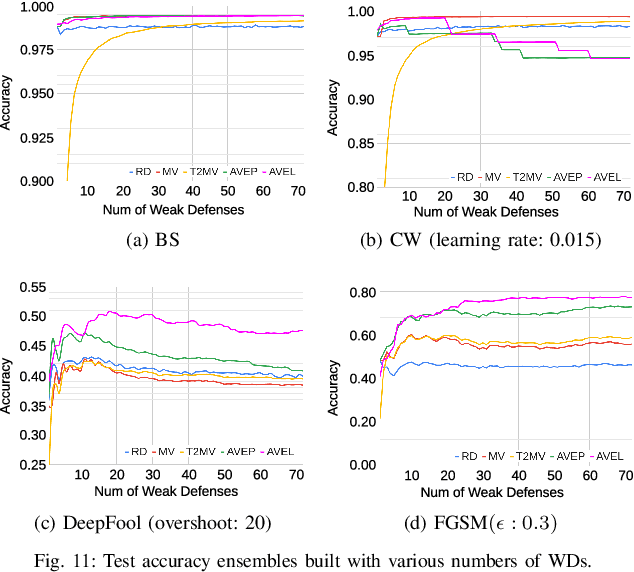
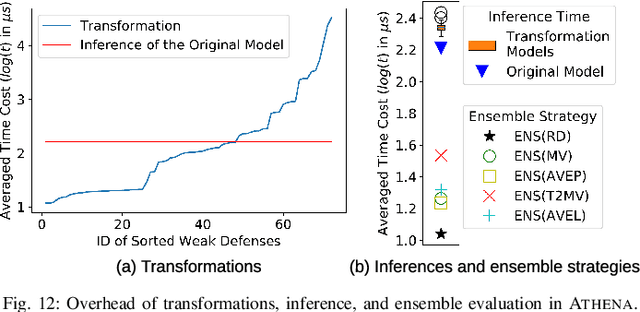
Despite achieving state-of-the-art performance across many domains, machine learning systems are highly vulnerable to subtle adversarial perturbations. Although defense approaches have been proposed in recent years, many have been bypassed by even weak adversarial attacks. An early study~\cite{he2017adversarial} shows that ensembles created by combining multiple weak defenses (i.e., input data transformations) are still weak. We show that it is indeed possible to construct effective ensembles using weak defenses to block adversarial attacks. However, to do so requires a diverse set of such weak defenses. In this work, we propose Athena, an extensible framework for building effective defenses to adversarial attacks against machine learning systems. Here we conducted a comprehensive empirical study to evaluate several realizations of Athena. More specifically, we evaluated the effectiveness of 5 ensemble strategies with a diverse set of many weak defenses that comprise transforming the inputs (e.g., rotation, shifting, noising, denoising, and many more) before feeding them to target deep neural network (DNN) classifiers. We evaluate the effectiveness of the ensembles with adversarial examples generated by 9 various adversaries (i.e., FGSM, CW, etc.) in 4 threat models (i.e., zero-knowledge, black-box, gray-box, white-box) on MNIST. We also explain, via a comprehensive empirical study, why building defenses based on the idea of many diverse weak defenses works, when it is most effective, and what its inherent limitations and overhead are.