 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCrowd-SFT: Crowdsourcing for LLM Alignment
Jun 04, 2025Large Language Models (LLMs) increasingly rely on Supervised Fine-Tuning (SFT) and Reinforcement Learning from Human Feedback (RLHF) to align model responses with human preferences. While RLHF employs a reinforcement learning approach with a separate reward model, SFT uses human-curated datasets for supervised learning. Both approaches traditionally depend on small, vetted groups of annotators, making them costly, prone to bias, and limited in scalability. We propose an open, crowd-sourced fine-tuning framework that addresses these limitations by enabling broader feedback collection for SFT without extensive annotator training. Our framework promotes incentive fairness via a point-based reward system correlated with Shapley values and guides model convergence through iterative model updates. Our multi-model selection framework demonstrates up to a 55% reduction in target distance over single-model selection, enabling subsequent experiments that validate our point-based reward mechanism's close alignment with Shapley values (a well-established method for attributing individual contributions) thereby supporting fair and scalable participation.
LLM-Assisted Rule Based Machine Translation for Low/No-Resource Languages
May 16, 2024We propose a new paradigm for machine translation that is particularly useful for no-resource languages (those without any publicly available bilingual or monolingual corpora): LLM-RBMT (LLM-Assisted Rule Based Machine Translation). Using the LLM-RBMT paradigm, we design the first language education/revitalization-oriented machine translator for Owens Valley Paiute (OVP), a critically endangered Indigenous American language for which there is virtually no publicly available data. We present a detailed evaluation of the translator's components: a rule-based sentence builder, an OVP to English translator, and an English to OVP translator. We also discuss the potential of the paradigm, its limitations, and the many avenues for future research that it opens up.
Minimizing The Maximum Distance Traveled To Form Patterns With Systems of Mobile Robots
Jun 28, 2020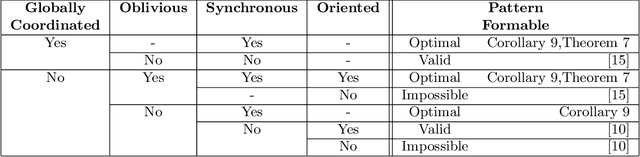
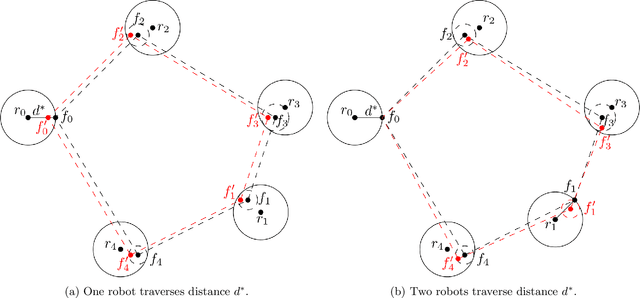
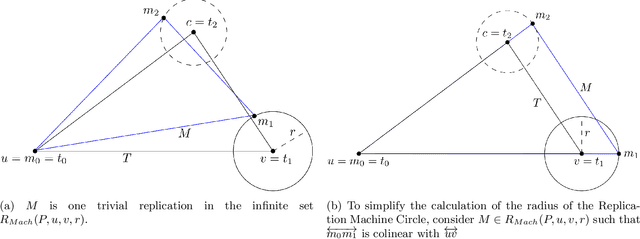
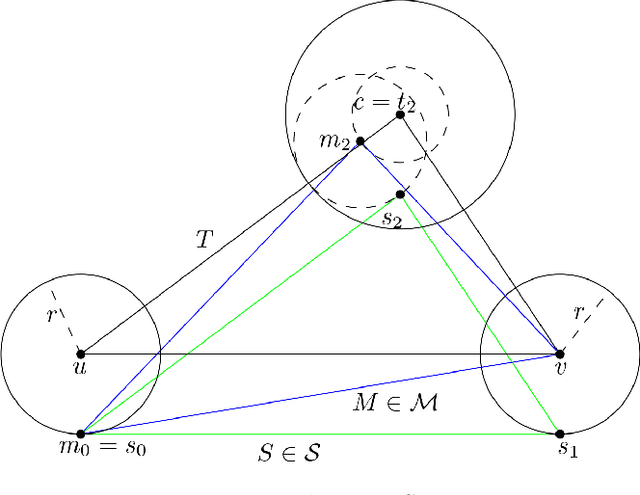
In the pattern formation problem, robots in a system must self-coordinate to form a given pattern, regardless of translation, rotation, uniform-scaling, and/or reflection. In other words, a valid final configuration of the system is a formation that is \textit{similar} to the desired pattern. While there has been no shortage of research in the pattern formation problem under a variety of assumptions, models, and contexts, we consider the additional constraint that the maximum distance traveled among all robots in the system is minimum. Existing work in pattern formation and closely related problems are typically application-specific or not concerned with optimality (but rather feasibility). We show the necessary conditions any optimal solution must satisfy and present a solution for systems of three robots. Our work also led to an interesting result that has applications beyond pattern formation. Namely, a metric for comparing two triangles where a distance of $0$ indicates the triangles are similar, and $1$ indicates they are \emph{fully dissimilar}.