 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImpact of a Soft Wearable Back-Support Device on Postural Stability during Trip-Like Perturbations
Jun 01, 2026The effectiveness of a soft wearable back-support device in enhancing postural stability was investigated under trip-like perturbations using two experimental paradigms: perturbed standing and perturbed walking. Healthy subjects completed trials under three different back-support conditions: no device, device worn with low stiffness, and device activated with high stiffness. Whole-body stability was quantified using the minimum Margin of Stability (MOS) at the point of maximal instability. Results demonstrated increased MOS during device use, indicating enhanced postural stability. In standing, MOS increased significantly with device stiffness, whereas in walking, both device conditions improved MOS relative to no device but did not differ significantly from each other. These findings highlight the potential of soft wearable back-support devices with adjustable stiffness to improve reactive balance control against external perturbations, with important implications for fall prevention. Future research should explore personalized stiffness optimization and evaluate efficacy in populations at elevated risk of falls.
Improved Postural Stability Using a Lightweight Semi-Active Soft Back Support Device Under Standing Perturbations
Jun 01, 2026Older adults are particularly susceptible to falls following perturbations during standing, such as forward loss of balance. Back support devices that assist trunk extension may help mitigate fall risk by preventing excessive trunk flexion. Previous studies have investigated heavy back support devices; however, these systems often introduced adverse effects on stability due to their added mass, which shifted the body's natural center of mass unfavorably. In contrast, lightweight passive devices have shown limited benefits, as they can generate only modest assistive forces during the relatively small trunk flexion associated with forward balance loss. In this study, we evaluated the effects of a lightweight semi-active soft back support device on postural stability following standing perturbations. Our device combines an active element (a pneumatic artificial muscle) in parallel with a passive elastic band. The active element rapidly provides assistive force following a perturbation, overcoming the limitations of passive devices. Experiments conducted with five healthy individuals demonstrated that the semi-active device significantly reduced whole-body angular momentum and increased the margin of stability, indicating improved balance recovery performance. These results highlight the promise of semi-active soft wearable robots as an effective and lightweight strategy for fall prevention during standing perturbations.
Soft Semi-active Back Support Device with Adaptive Force Profiles using Variable-elastic Actuation and Weight Feedback
Mar 04, 2026Portable active back support devices (BSDs) offer tunable assistance but are often bulky and heavy, limiting their usability. In contrast, passive BSDs are lightweight and compact but lack the ability to adapt their assistance to different back movements. We present a soft, lightweight, and compact BSD that combines a variable-stiffness passive element and an active element (an artificial muscle) in parallel. The device provides tunable assistance through discrete changes in stiffness values and active force levels. We validate the device's tuning capabilities through bench testing and on-body characterization. Further, we use the device's tuning capabilities to provide weight-adaptive object lifting and lowering assistance. We detect the weight handled by the user based on forearm force myography and upper-back inertial measurement unit data. Furthermore, electromyography analyses in five participants performing symmetric object lifting and lowering tasks showed reductions in back extensor activity. Preliminary results in one participant also indicated reduced muscle activity during asymmetric lifting.
Ground Reaction Force Estimation via Time-aware Knowledge Distillation
Jun 12, 2025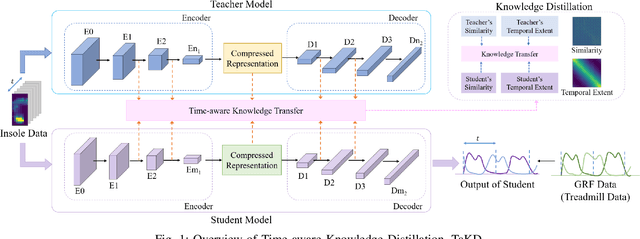



Human gait analysis with wearable sensors has been widely used in various applications, such as daily life healthcare, rehabilitation, physical therapy, and clinical diagnostics and monitoring. In particular, ground reaction force (GRF) provides critical information about how the body interacts with the ground during locomotion. Although instrumented treadmills have been widely used as the gold standard for measuring GRF during walking, their lack of portability and high cost make them impractical for many applications. As an alternative, low-cost, portable, wearable insole sensors have been utilized to measure GRF; however, these sensors are susceptible to noise and disturbance and are less accurate than treadmill measurements. To address these challenges, we propose a Time-aware Knowledge Distillation framework for GRF estimation from insole sensor data. This framework leverages similarity and temporal features within a mini-batch during the knowledge distillation process, effectively capturing the complementary relationships between features and the sequential properties of the target and input data. The performance of the lightweight models distilled through this framework was evaluated by comparing GRF estimations from insole sensor data against measurements from an instrumented treadmill. Empirical results demonstrated that Time-aware Knowledge Distillation outperforms current baselines in GRF estimation from wearable sensor data.
Topological Persistence Guided Knowledge Distillation for Wearable Sensor Data
Jul 07, 2024



Deep learning methods have achieved a lot of success in various applications involving converting wearable sensor data to actionable health insights. A common application areas is activity recognition, where deep-learning methods still suffer from limitations such as sensitivity to signal quality, sensor characteristic variations, and variability between subjects. To mitigate these issues, robust features obtained by topological data analysis (TDA) have been suggested as a potential solution. However, there are two significant obstacles to using topological features in deep learning: (1) large computational load to extract topological features using TDA, and (2) different signal representations obtained from deep learning and TDA which makes fusion difficult. In this paper, to enable integration of the strengths of topological methods in deep-learning for time-series data, we propose to use two teacher networks, one trained on the raw time-series data, and another trained on persistence images generated by TDA methods. The distilled student model utilizes only the raw time-series data at test-time. This approach addresses both issues. The use of KD with multiple teachers utilizes complementary information, and results in a compact model with strong supervisory features and an integrated richer representation. To assimilate desirable information from different modalities, we design new constraints, including orthogonality imposed on feature correlation maps for improving feature expressiveness and allowing the student to easily learn from the teacher. Also, we apply an annealing strategy in KD for fast saturation and better accommodation from different features, while the knowledge gap between the teachers and student is reduced. Finally, a robust student model is distilled, which uses only the time-series data as an input, while implicitly preserving topological features.
* Engineering Applications of Artificial Intelligence 130, 107719