 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement Learning based Multi-connectivity Resource Allocation in Factory Automation Systems
Aug 26, 2022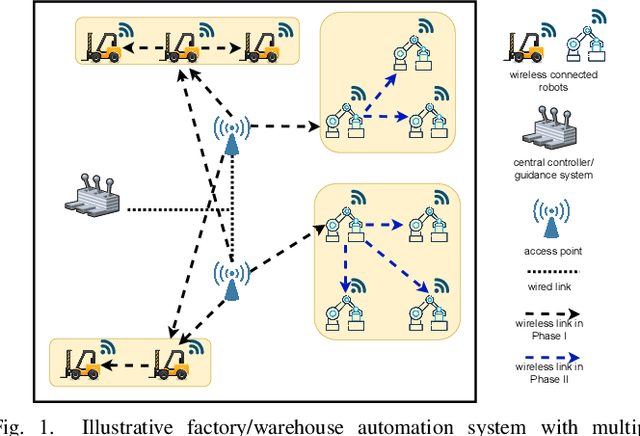
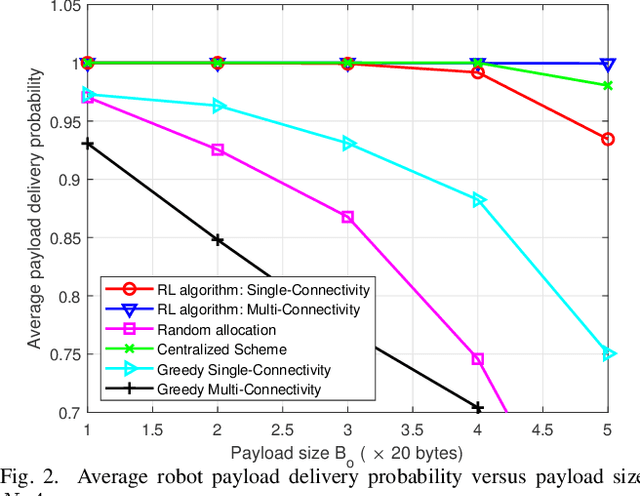
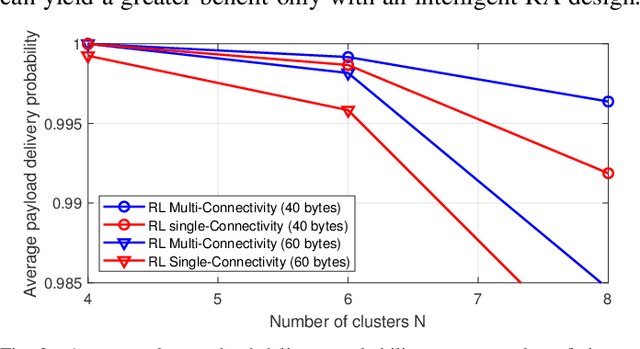
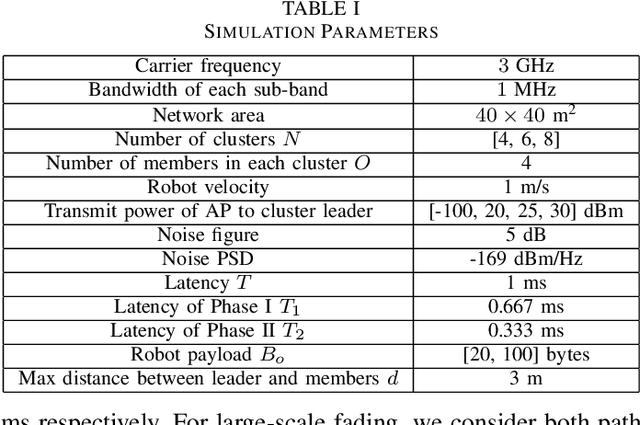
We propose joint user association, channel assignment and power allocation for mobile robot Ultra-Reliable and Low Latency Communications (URLLC) based on multi-connectivity and reinforcement learning. The mobile robots require control messages from the central guidance system at regular intervals. We use a two-phase communication scheme where robots can form multiple clusters. The robots in a cluster are close to each other and can have reliable Device-to-Device (D2D) communications. In Phase I, the APs transmit the combined payload of a cluster to the cluster leader within a latency constraint. The cluster leader broadcasts this message to its members in Phase II. We develop a distributed Multi-Agent Reinforcement Learning (MARL) algorithm for joint user association and resource allocation (RA) for Phase I. The cluster leaders use their local Channel State Information (CSI) to decide the APs for connection along with the sub-band and power level. The cluster leaders utilize multi-connectivity to connect to multiple APs to increase their reliability. The objective is to maximize the successful payload delivery probability for all robots. Illustrative simulation results indicate that the proposed scheme can approach the performance of the centralized algorithm and offer a substantial gain in reliability as compared to single-connectivity (when cluster leaders are able to connect to 1 AP).
Multi-Agent Reinforcement Learning for Joint Channel Assignment and Power Allocation in Platoon-Based C-V2X Systems
Nov 09, 2020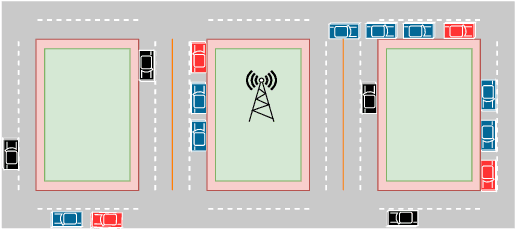
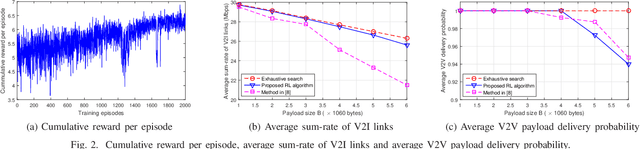
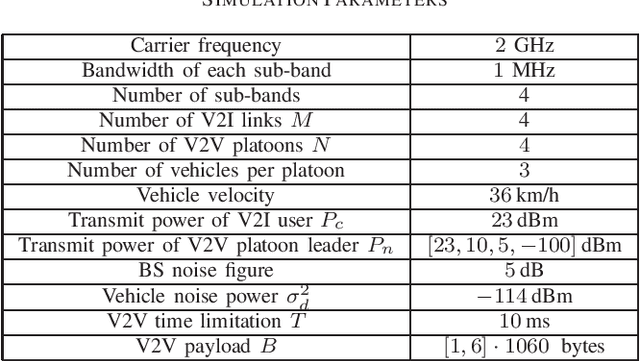
We consider the problem of joint channel assignment and power allocation in underlaid cellular vehicular-to-everything (C-V2X) systems where multiple vehicle-to-infrastructure (V2I) uplinks share the time-frequency resources with multiple vehicle-to-vehicle (V2V) platoons that enable groups of connected and autonomous vehicles to travel closely together. Due to the nature of fast channel variant in vehicular environment, traditional centralized optimization approach relying on global channel information might not be viable in C-V2X systems with large number of users. Utilizing a reinforcement learning (RL) approach, we propose a distributed resource allocation (RA) algorithm to overcome this challenge. Specifically, we model the RA problem as a multi-agent system. Based solely on the local channel information, each platoon leader, who acts as an agent, collectively interacts with each other and accordingly selects the optimal combination of sub-band and power level to transmit its signals. Toward this end, we utilize the double deep Q-learning algorithm to jointly train the agents under the objectives of simultaneously maximizing the V2I sum-rate and satisfying the packet delivery probability of each V2V link in a desired latency limitation. Simulation results show that our proposed RL-based algorithm achieves a close performance compared to that of the well-known exhaustive search algorithm.