 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTeaching Compositionality to CNNs
Jun 14, 2017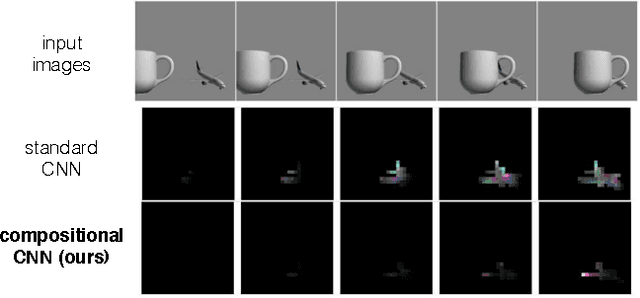
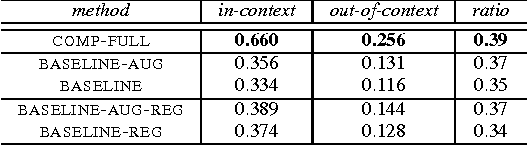
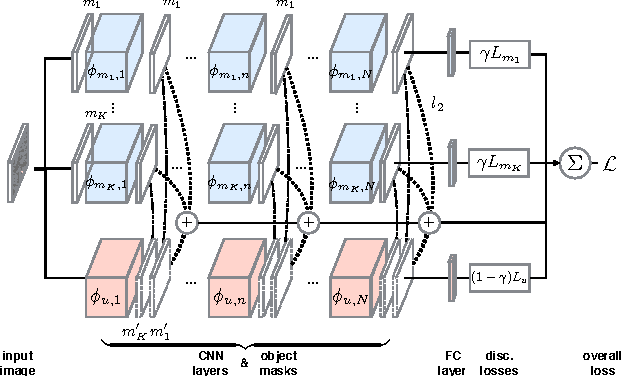
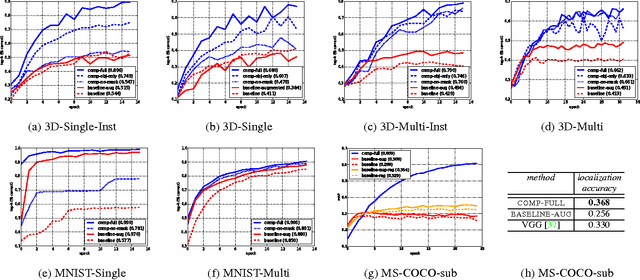
Convolutional neural networks (CNNs) have shown great success in computer vision, approaching human-level performance when trained for specific tasks via application-specific loss functions. In this paper, we propose a method for augmenting and training CNNs so that their learned features are compositional. It encourages networks to form representations that disentangle objects from their surroundings and from each other, thereby promoting better generalization. Our method is agnostic to the specific details of the underlying CNN to which it is applied and can in principle be used with any CNN. As we show in our experiments, the learned representations lead to feature activations that are more localized and improve performance over non-compositional baselines in object recognition tasks.
A backward pass through a CNN using a generative model of its activations
Nov 08, 2016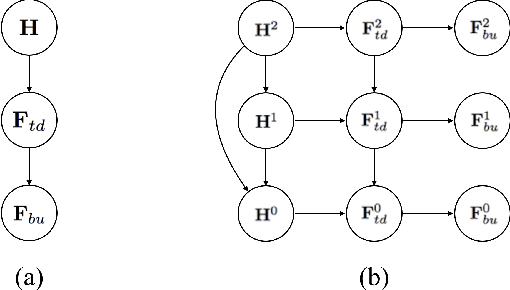


Neural networks have shown to be a practical way of building a very complex mapping between a pre-specified input space and output space. For example, a convolutional neural network (CNN) mapping an image into one of a thousand object labels is approaching human performance in this particular task. However the mapping (neural network) does not automatically lend itself to other forms of queries, for example, to detect/reconstruct object instances, to enforce top-down signal on ambiguous inputs, or to recover object instances from occlusion. One way to address these queries is a backward pass through the network that fuses top-down and bottom-up information. In this paper, we show a way of building such a backward pass by defining a generative model of the neural network's activations. Approximate inference of the model would naturally take the form of a backward pass through the CNN layers, and it addresses the aforementioned queries in a unified framework.