 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolarized skylight orientation determination artificial neural network
Jul 06, 2021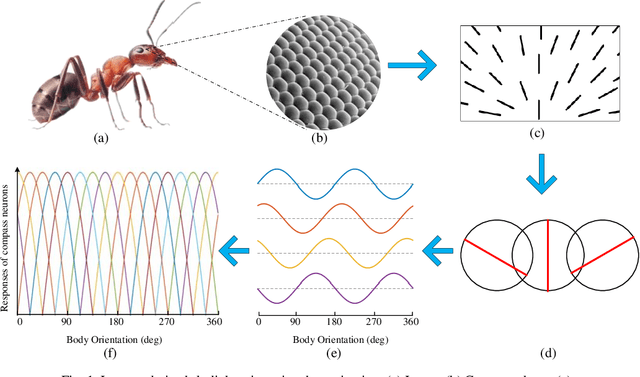
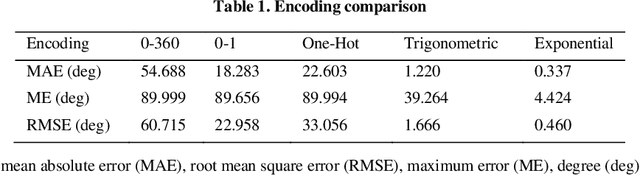
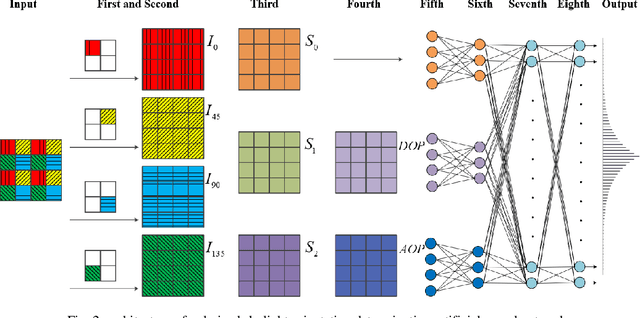
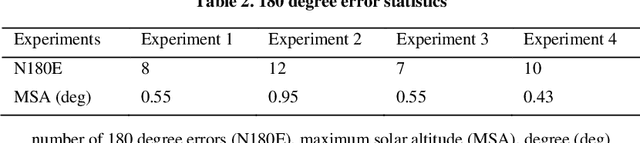
This paper proposes an artificial neural network to determine orientation using polarized skylight. This neural network has specific dilated convolution, which can extract light intensity information of different polarization directions. Then, the degree of polarization (DOP) and angle of polarization (AOP) are directly extracted in the network. In addition, the exponential function encoding of orientation is designed as the network output, which can better reflect the insect's encoding of polarization information, and improve the accuracy of orientation determination. Finally, training and testing were conducted on a public polarized skylight navigation dataset, and the experimental results proved the stability and effectiveness of the network.
Exploration of Whether Skylight Polarization Patterns Contain Three-dimensional Attitude Information
Nov 30, 2020



Our previous work has demonstrated that Rayleigh model, which is widely used in polarized skylight navigation to describe skylight polarization patterns, does not contain three-dimensional (3D) attitude information [1]. However, it is still necessary to further explore whether the skylight polarization patterns contain 3D attitude information. So, in this paper, a social spider optimization (SSO) method is proposed to estimate three Euler angles, which considers the difference of each pixel among polarization images based on template matching (TM) to make full use of the captured polarization information. In addition, to explore this problem, we not only use angle of polarization (AOP) and degree of polarization (DOP) information, but also the light intensity (LI) information. So, a sky model is established, which combines Berry model and Hosek model to fully describe AOP, DOP, and LI information in the sky, and considers the influence of four neutral points, ground albedo, atmospheric turbidity, and wavelength. The results of simulation show that the SSO algorithm can estimate 3D attitude and the established sky model contains 3D attitude information. However, when there are measurement noise or model error, the accuracy of 3D attitude estimation drops significantly. Especially in field experiment, it is very difficult to estimate 3D attitude. Finally, the results are discussed in detail.
Polarized Skylight Navigation System (PSNS)/ GNSS/SINS Integrated Navigation
Oct 20, 2020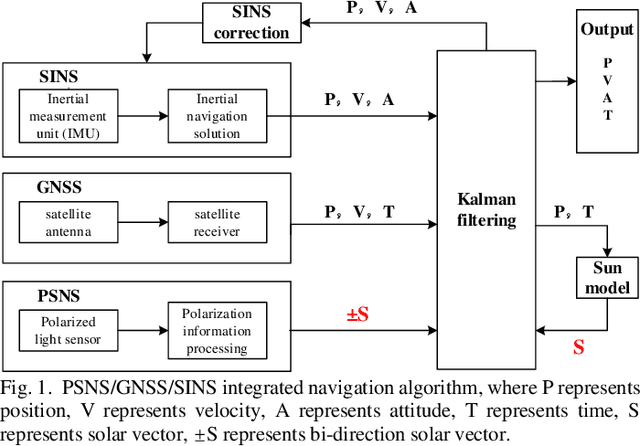
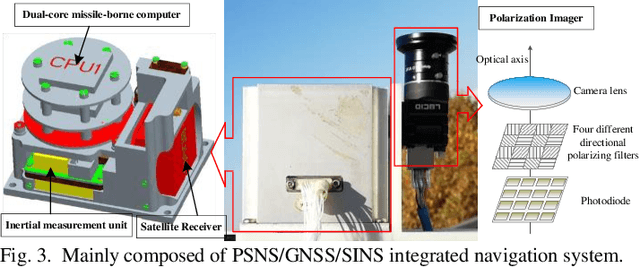
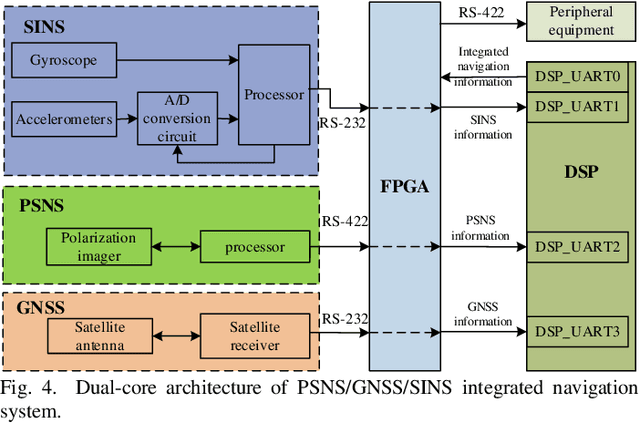
Bioinspired polarized skylight navigation system (PSNS) is a new navigation method, which imitates insects using polarized skylight for navigation. However, the latest research shows that the current PSNS is difficult to obtain the three-dimensional (3D) attitude in real time only relying on polarized skylight. This causes not only that three-dimensional (3D) cannot be estimated only by PSNS in real time, but also when polarized light is integrated with other navigation methods, 3D attitude cannot be directly used for integrated navigation. Therefore, an integrated navigation algorithm based on bi-direction solar vector is proposed, and a DSP+FPGA (digital signal processor + field programmable gate array) dual-core architecture PSNS/GNSS/SINS (global navigation satellite system/strapdown inertial navigation system) integrated navigation system was constructed.