 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid Neural Network and Conventional Controller Approach for Robust Control of Highly Unstable Systems: Application to Tilt-Rotor Control
Jun 07, 2026Multirotors are widely used in applications ranging from surveillance to precision agriculture, yet conventional designs remain limited by their under-actuation. Tilt-rotor configurations overcome this limitation by enabling full actuation. This paper investigates neural-network-based control strategies for a fully actuated tilt-rotor system with four thrust-vectoring inputs. Our work is structured in two parts. First, we deliberately present a negative result by evaluating a direct input-output control approach. In this method, multilayer perceptrons (MLPs), long short-term memory (LSTM) networks, and transformer models are trained to map system states and their desired values directly to control signals. We show that this strategy fails to stabilize the system, highlighting the inherent difficulty of applying direct input-output learning to highly unstable plants. Second, as the main contribution, we propose a neural-network-enhanced sliding mode controller (SMC). The method decomposes the system dynamics into input-independent and input-dependent components, with the former learned from a small dataset using lightweight networks, thereby reducing real-time computational demands. Moreover, the proposed method can be trained using flight logs collected from low-performance controllers, and the resulting dynamic model learned from real-world data can be used in simulation. We further compare MLP- and LSTM-based implementations under model uncertainties and external disturbances, demonstrating the robustness and effectiveness of the proposed approach; in particular, the controller with the LSTM plant dynamics predictor achieves superior performance to its MLP-based counterpart while also exhibiting lower runtime.
Novel Magnetic Actuation Strategies for Precise Ferrofluid Marble Manipulation in Magnetic Digital Microfluidics: Position Control and Applications
Dec 03, 2024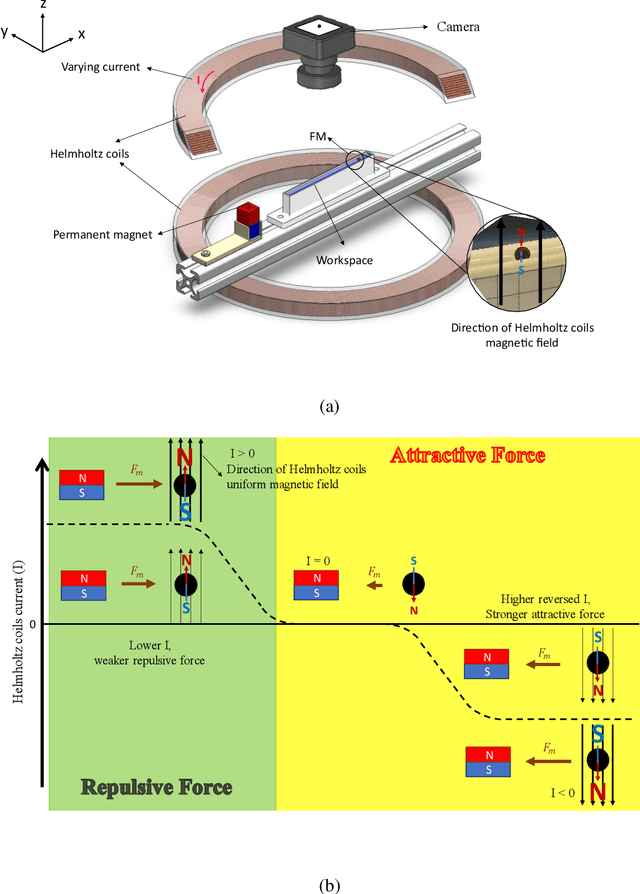
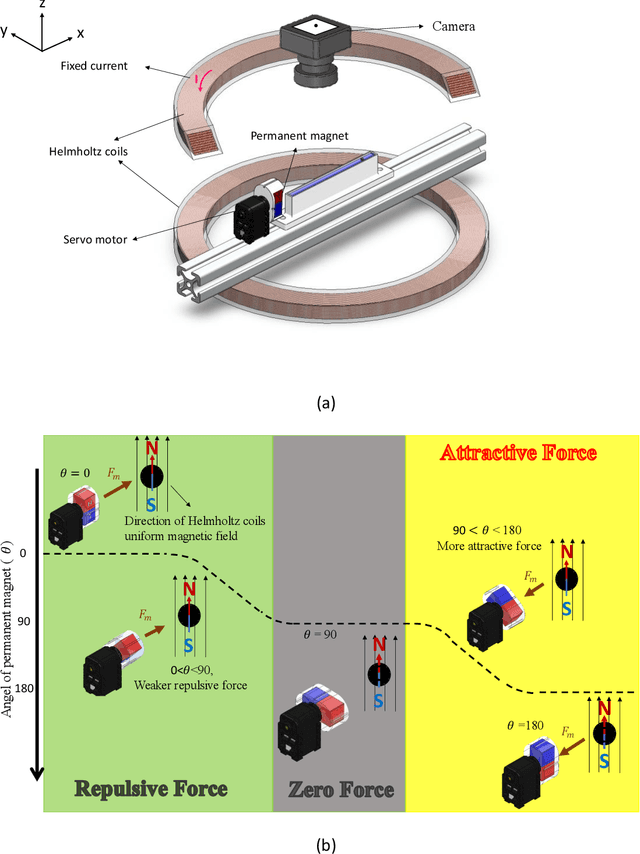
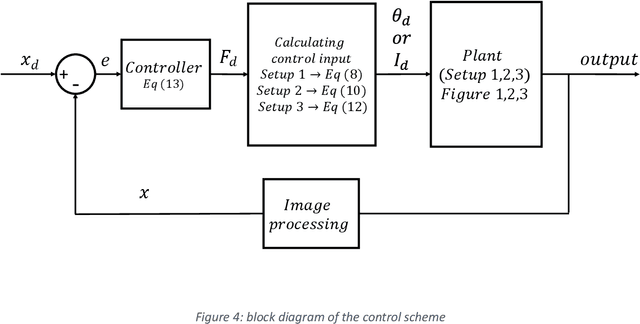
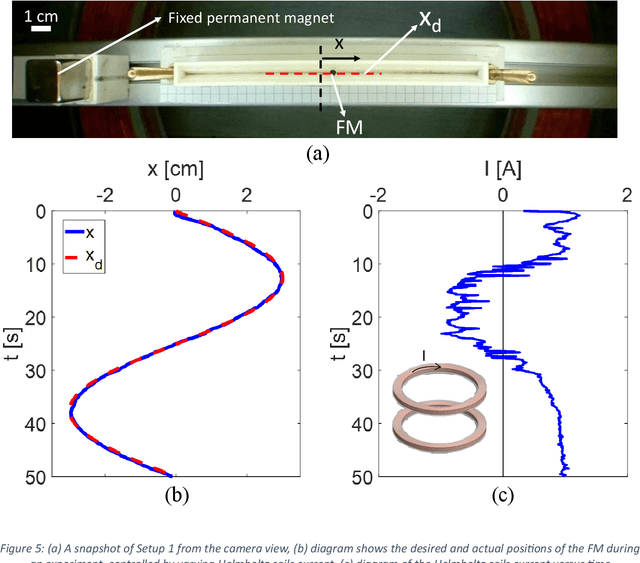
Precise manipulation of liquid marbles has significant potential in various applications such as lab-on-a-chip systems, drug delivery, and biotechnology and has been a challenge for researchers. Ferrofluid marble (FM) is a marble with a ferrofluid core that can easily be manipulated by a magnetic field. Although FMs have great potential for accurate positioning and manipulation, these marbles have not been precisely controlled in magnetic digital microfluidics, so far. In this study for the first time, a novel method of magnetic actuation is proposed using a pair of Helmholtz coils and permanent magnets. The governing equations for controlling the FM position are investigated, and it is shown that there are three different strategies for adjusting the applied magnetic force. Then, experiments are conducted to demonstrate the capability of the proposed method. To this aim, different magnetic setups are proposed for manipulating FMs. These setups are compared in terms of energy consumption and tracking ability across various frequencies. The study showcases several applications of precise FM position control, including controllable reciprocal positioning, simultaneous position control of two FMs, the transport of non-magnetic liquid marbles using the FMs, and sample extraction method from the liquid core of the FM.