 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExternal Photoreflective Tactile Sensing Based on Surface Deformation Measurement
Nov 09, 2025We present a tactile sensing method enabled by the mechanical compliance of soft robots; an externally attachable photoreflective module reads surface deformation of silicone skin to estimate contact force without embedding tactile transducers. Locating the sensor off the contact interface reduces damage risk, preserves softness, and simplifies fabrication and maintenance. We first characterize the optical sensing element and the compliant skin, thendetermine the design of a prototype tactile sensor. Compression experiments validate the approach, exhibiting a monotonic force output relationship consistent with theory, low hysteresis, high repeatability over repeated cycles, and small response indentation speeds. We further demonstrate integration on a soft robotic gripper, where the module reliably detects grasp events. Compared with liquid filled or wireembedded tactile skins, the proposed modular add on architecture enhances durability, reduces wiring complexity, and supports straightforward deployment across diverse robot geometries. Because the sensing principle reads skin strain patterns, it also suggests extensions to other somatosensory cues such as joint angle or actuator state estimation from surface deformation. Overall, leveraging surface compliance with an external optical module provides a practical and robust route to equip soft robots with force perception while preserving structural flexibility and manufacturability, paving the way for robotic applications and safe human robot collaboration.
Fixation-based Self-calibration for Eye Tracking in VR Headsets
Nov 01, 2023This study proposes a novel self-calibration method for eye tracking in a virtual reality (VR) headset. The proposed method is based on the assumptions that the user's viewpoint can freely move and that the points of regard (PoRs) from different viewpoints are distributed within a small area on an object surface during visual fixation. In the method, fixations are first detected from the time-series data of uncalibrated gaze directions using an extension of the I-VDT (velocity and dispersion threshold identification) algorithm to a three-dimensional (3D) scene. Then, the calibration parameters are optimized by minimizing the sum of a dispersion metrics of the PoRs. The proposed method can potentially identify the optimal calibration parameters representing the user-dependent offset from the optical axis to the visual axis without explicit user calibration, image processing, or marker-substitute objects. For the gaze data of 18 participants walking in two VR environments with many occlusions, the proposed method achieved an accuracy of 2.1$^\circ$, which was significantly lower than the average offset. Our method is the first self-calibration method with an average error lower than 3$^\circ$ in 3D environments. Further, the accuracy of the proposed method can be improved by up to 1.2$^\circ$ by refining the fixation detection or optimization algorithm.
Computational Models for SA, RA, PC Afferent to Reproduce Neural Responses to Dynamic Stimulus Using FEM Analysis and a Leaky Integrate-and-Fire Model
Aug 01, 2022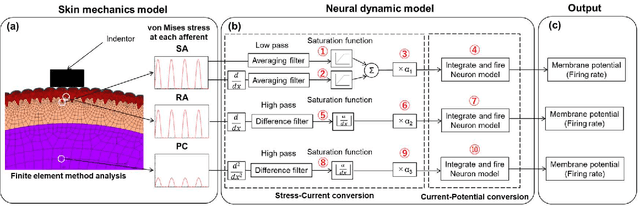
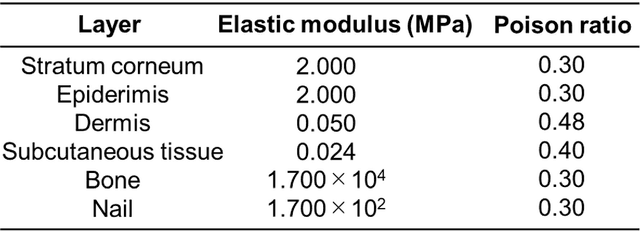
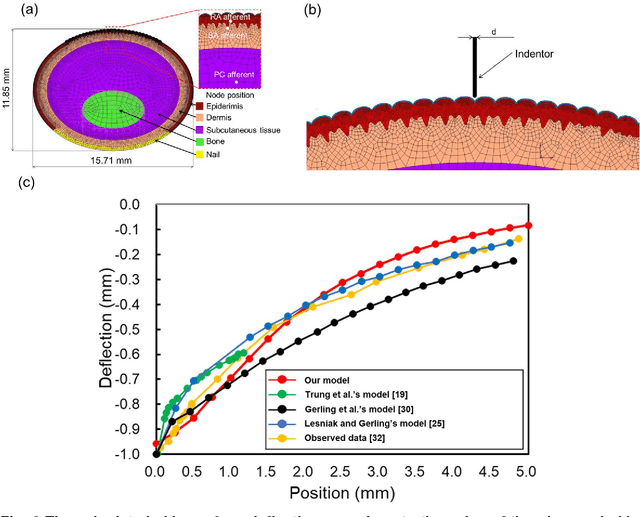

Tactile afferents such as (RA), and Pacinian (PC) afferents that respond to external stimuli enable complicated actions such as grasping, stroking and identifying an object. To understand the tactile sensation induced by these actions deeply, the activities of the tactile afferents need to be revealed. For this purpose, we develop a computational model for each tactile afferent for vibration stimuli, combining finite element analysis finite element method (FEM) analysis and a leaky integrate-and-fire model that represents the neural characteristics. This computational model can easily estimate the neural activities of the tactile afferents without measuring biological data. Skin deformation calculated using FEM analysis is substituted into the integrate-and-fire model as current input to calculate the membrane potential of each tactile afferent. We optimized parameters in the integrate-and-fire models using reported biological data. Then, we calculated the responses of the numerical models to sinusoidal, diharmonic, and white-noise-like mechanical stimuli to validate the proposed numerical models. From the result, the computational models well reproduced the neural responses to vibration stimuli such as sinusoidal, diharmonic, and noise stimuli and compare favorably with the similar computational models that can simulate the responses to vibration stimuli.