 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeARKitTrack: A New Diverse Dataset for Tracking Using Mobile RGB-D Data
Mar 24, 2023Compared with traditional RGB-only visual tracking, few datasets have been constructed for RGB-D tracking. In this paper, we propose ARKitTrack, a new RGB-D tracking dataset for both static and dynamic scenes captured by consumer-grade LiDAR scanners equipped on Apple's iPhone and iPad. ARKitTrack contains 300 RGB-D sequences, 455 targets, and 229.7K video frames in total. Along with the bounding box annotations and frame-level attributes, we also annotate this dataset with 123.9K pixel-level target masks. Besides, the camera intrinsic and camera pose of each frame are provided for future developments. To demonstrate the potential usefulness of this dataset, we further present a unified baseline for both box-level and pixel-level tracking, which integrates RGB features with bird's-eye-view representations to better explore cross-modality 3D geometry. In-depth empirical analysis has verified that the ARKitTrack dataset can significantly facilitate RGB-D tracking and that the proposed baseline method compares favorably against the state of the arts. The code and dataset is available at https://arkittrack.github.io.
'Skimming-Perusal' Tracking: A Framework for Real-Time and Robust Long-term Tracking
Sep 04, 2019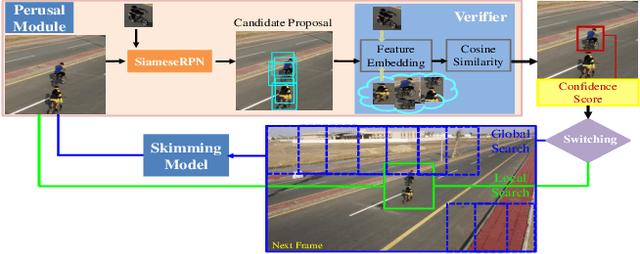
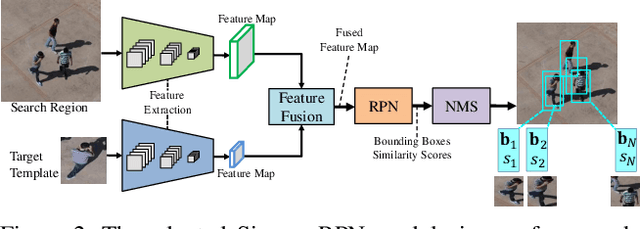
Compared with traditional short-term tracking, long-term tracking poses more challenges and is much closer to realistic applications. However, few works have been done and their performance have also been limited. In this work, we present a novel robust and real-time long-term tracking framework based on the proposed skimming and perusal modules. The perusal module consists of an effective bounding box regressor to generate a series of candidate proposals and a robust target verifier to infer the optimal candidate with its confidence score. Based on this score, our tracker determines whether the tracked object being present or absent, and then chooses the tracking strategies of local search or global search respectively in the next frame. To speed up the image-wide global search, a novel skimming module is designed to efficiently choose the most possible regions from a large number of sliding windows. Numerous experimental results on the VOT-2018 long-term and OxUvA long-term benchmarks demonstrate that the proposed method achieves the best performance and runs in real-time. The source codes are available at https://github.com/iiau-tracker/SPLT.