 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBayesian Active Object Recognition and 6D Pose Estimation from Multimodal Contact Sensing
Mar 22, 2026We present an active tactile exploration framework for joint object recognition and 6D pose estimation. The proposed method integrates wrist force/torque sensing, GelSight tactile sensing, and free-space constraints within a Bayesian inference framework that maintains a belief over object class and pose during active tactile exploration. By combining contact and non-contact evidence, the framework reduces ambiguity and improves robustness in the joint class-pose estimation problem. To enable efficient inference in the large hypothesis space, we employ a customized particle filter that progressively samples particles based on new observations. The inferred belief is further used to guide active exploration by selecting informative next touches under reachability constraints. For effective data collection, a motion planning and control framework is developed to plan and execute feasible paths for tactile exploration, handle unexpected contacts and GelSight-surface alignment with tactile servoing. We evaluate the framework in simulation and on a Franka Panda robot using 11 YCB objects. Results show that incorporating tactile and free-space information substantially improves recognition and pose estimation accuracy and stability, while reducing the number of action cycles compared with force/torque-only baselines. Code, dataset, and supplementary material will be made available online.
A Bayesian framework for active object recognition, pose estimation and shape transfer learning through touch
Sep 10, 2024



As humans can explore and understand the world through the sense of touch, tactile sensing is also an important aspect of robotic perception. In unstructured environments, robots can encounter both known and novel objects, this calls for a method to address both known and novel objects. In this study, we combine a particle filter (PF) and Gaussian process implicit surface (GPIS) in a unified Bayesian framework. The framework can differentiate between known and novel objects, perform object recognition, estimate pose for known objects, and reconstruct shapes for unknown objects, in an active learning fashion. By grounding the selection of the GPIS prior with the maximum-likelihood-estimation (MLE) shape from the PF, the knowledge about known objects' shapes can be transferred to learn novel shapes. An exploration procedure with global shape estimation is proposed to guide active data acquisition and conclude the exploration when sufficient information is obtained. The performance of the proposed Bayesian framework is evaluated through simulations on known and novel objects, initialized with random poses and is compared with a rapidly explore random tree (RRT).The results show that the proposed exploration procedure, utilizing global shape estimation, achieves faster exploration than the RRT-based local exploration procedure. Overall, results indicate that the proposed framework is effective and efficient in object recognition, pose estimation and shape reconstruction. Moreover, we show that a learned shape can be included as a new prior and used effectively for future object recognition and pose estimation of novel objects.
Modeling and Multi-objective Optimization of a Kind of Teaching Manipulator
Jan 31, 2018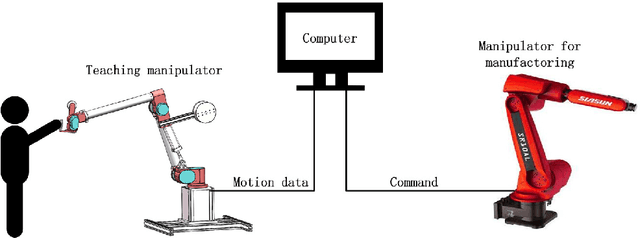
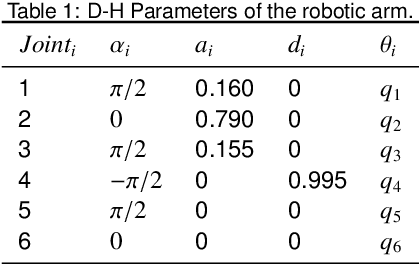
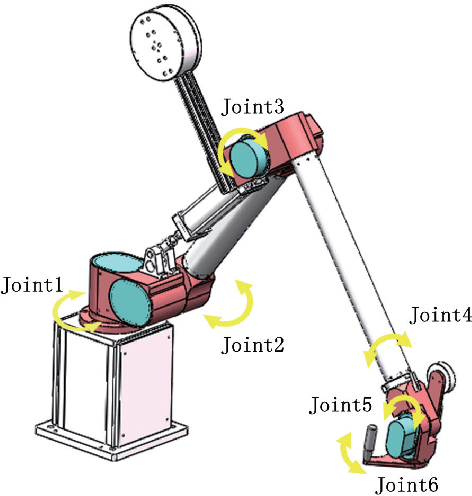
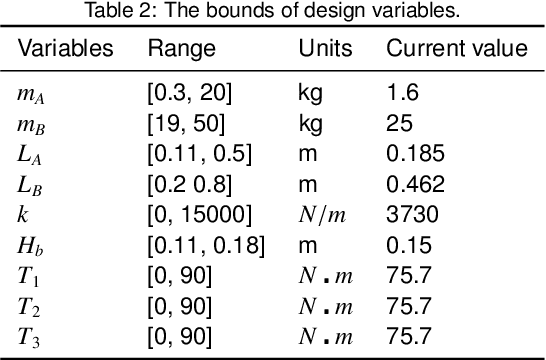
A new kind of six degree-of-freedom teaching manipulator without actuators is designed, for recording and conveniently setting a trajectory of an industrial robot. The device requires good gravity balance and operating force performance to ensure being controlled easily and fluently. In this paper, we propose a process for modeling the manipulator and then the model is used to formulate a multi-objective optimization problem to optimize the design of the testing manipulator. Three objectives, including total mass of the device, gravity balancing and operating force performance are analyzed and defined. A popular non-dominated sorting genetic algorithm (NSGA-II-CDP) is used to solve the optimization problem. The obtained solutions all outperform the design of a human expert. To extract design knowledge, an innovization study is performed to establish meaningful implicit relationship between the objective space and the decision space, which can be reused by the designer in future design process.