 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDirectional Mollification for Controlled Smooth Path Generation
Mar 23, 2026Path generation, the problem of producing smooth, executable paths from discrete planning outputs, such as waypoint sequences, is a fundamental step in the control of autonomous robots, industrial robots, and CNC machines, as path following and trajectory tracking controllers impose strict differentiability requirements on their reference inputs to guarantee stability and convergence, particularly for nonholonomic systems. Mollification has been recently proposed as a computationally efficient and analytically tractable tool for path generation, offering formal smoothness and curvature guarantees with advantages over spline interpolation and optimization-based methods. However, this mollification is subject to a fundamental geometric constraint: the smoothed path is confined within the convex hull of the original path, precluding exact waypoint interpolation, even when explicitly required by mission specifications or upstream planners. We introduce directional mollification, a novel operator that resolves this limitation while retaining the analytical tractability of classical mollification. The proposed operator generates infinitely differentiable paths that strictly interpolate prescribed waypoints, converge to the original non-differentiable input with arbitrary precision, and satisfy explicit curvature bounds given by a closed-form expression, addressing the core requirements of path generation for controlled autonomous systems. We further establish a parametric family of path generation operators that contains both classical and directional mollification as special cases, providing a unifying theoretical framework for the systematic generation of smooth, feasible paths from non-differentiable planning outputs.
Efficient Generation of Smooth Paths with Curvature Guarantees by Mollification
Dec 15, 2025Most path following and trajectory tracking algorithms in mobile robotics require the desired path or trajectory to be defined by at least twice continuously differentiable functions to guarantee key properties such as global convergence, especially for nonholonomic robots like unicycles with speed constraints. Consequently, these algorithms typically exclude continuous but non-differentiable paths, such as piecewise functions. Despite this exclusion, such paths provide convenient high-level inputs for describing robot missions or behavior. While techniques such as spline interpolation or optimization-based methods are commonly used to smooth non-differentiable paths or create feasible ones from sequences of waypoints, they either can produce unnecessarily complex trajectories or are computationally expensive. In this work, we present a method to regularize non-differentiable functions and generate feasible paths through mollification. Specifically, we approximate an arbitrary path with a differentiable function that can converge to it with arbitrary precision. Additionally, we provide a systematic method for bounding the curvature of generated paths, which we demonstrate by applying it to paths resulting from linking a sequence of waypoints with segments. The proposed approach is computationally efficient, enabling real-time implementation on microcontrollers and compatibility with standard trajectory tracking and path following algorithms.
Distributed Oscillatory Guidance for Formation Flight of Fixed-Wing Drones
Jul 22, 2025The autonomous formation flight of fixed-wing drones is hard when the coordination requires the actuation over their speeds since they are critically bounded and aircraft are mostly designed to fly at a nominal airspeed. This paper proposes an algorithm to achieve formation flights of fixed-wing drones without requiring any actuation over their speed. In particular, we guide all the drones to travel over specific paths, e.g., parallel straight lines, and we superpose an oscillatory behavior onto the guiding vector field that drives the drones to the paths. This oscillation enables control over the average velocity along the path, thereby facilitating inter-drone coordination. Each drone adjusts its oscillation amplitude distributively in a closed-loop manner by communicating with neighboring agents in an undirected and connected graph. A novel consensus algorithm is introduced, leveraging a non-negative, asymmetric saturation function. This unconventional saturation is justified since negative amplitudes do not make drones travel backward or have a negative velocity along the path. Rigorous theoretical analysis of the algorithm is complemented by validation through numerical simulations and a real-world formation flight.
Inverse Kinematics on Guiding Vector Fields for Robot Path Following
Feb 24, 2025



Inverse kinematics is a fundamental technique for motion and positioning control in robotics, typically applied to end-effectors. In this paper, we extend the concept of inverse kinematics to guiding vector fields for path following in autonomous mobile robots. The desired path is defined by its implicit equation, i.e., by a collection of points belonging to one or more zero-level sets. These level sets serve as a reference to construct an error signal that drives the guiding vector field toward the desired path, enabling the robot to converge and travel along the path by following such a vector field. We start with the formal exposition on how inverse kinematics can be applied to guiding vector fields for single-integrator robots in an m-dimensional Euclidean space. Then, we leverage inverse kinematics to ensure that the level-set error signal behaves as a linear system, facilitating control over the robot's transient motion toward the desired path and allowing for the injection of feed-forward signals to induce precise motion behavior along the path. We then propose solutions to the theoretical and practical challenges of applying this technique to unicycles with constant speeds to follow 2D paths with precise transient control. We finish by validating the predicted theoretical results through real flights with fixed-wing drones.
Fully distributed and resilient source seeking for robot swarms
Oct 21, 2024



We propose a self-contained, resilient and fully distributed solution for locating the maximum of an unknown 3D scalar field using a swarm of robots that travel at constant speeds. Unlike conventional reactive methods relying on gradient information, our methodology enables the swarm to determine an ascending direction so that it approaches the source with arbitrary precision. Our source-seeking solution consists of three algorithms. The first two algorithms run sequentially and distributively at a high frequency providing barycentric coordinates and the ascending direction respectively to the individual robots. The third algorithm is the individual control law for a robot to track the estimated ascending direction. We show that the two algorithms with higher frequency have an exponential convergence to their eventual values since they are based on the standard consensus protocol for first-order dynamical systems; their high frequency depends on how fast the robots travel through the scalar field. The robots are not constrained to any particular geometric formation, and we study both discrete and continuous distributions of robots within swarm shapes. The shape analysis reveals the resiliency of our approach as expected in robot swarms, i.e., by amassing robots we ensure the source-seeking functionality in the event of missing or misplaced individuals or even if the robot network splits into two or more disconnected subnetworks. In addition, we also enhance the robustness of the algorithm by presenting conditions for \emph{optimal} swarm shapes, in the sense that the ascending directions can be closely parallel to the field's gradient. We exploit such an analysis so that the swarm can adapt to unknown environments by morphing its shape and maneuvering while still following an ascending direction.
Behavioral-based circular formation control for robot swarms
Sep 16, 2023



This paper focuses on coordinating a robot swarm orbiting a convex path without collisions among the individuals. The individual robots lack braking capabilities and can only adjust their courses while maintaining their constant but different speeds. Instead of controlling the spatial relations between the robots, our formation control algorithm aims to deploy a dense robot swarm that mimics the behavior of tornado schooling fish. To achieve this objective safely, we employ a combination of a scalable overtaking rule, a guiding vector field, and a control barrier function with an adaptive radius to facilitate smooth overtakes. The decision-making process of the robots is distributed, relying only on local information. Practical applications include defensive structures or escorting missions with the added resiliency of a swarm without a centralized command. We provide a rigorous analysis of the proposed strategy and validate its effectiveness through numerical simulations involving a high density of unicycles.
Energy-Aware Planning-Scheduling for Autonomous Aerial Robots
Jul 22, 2022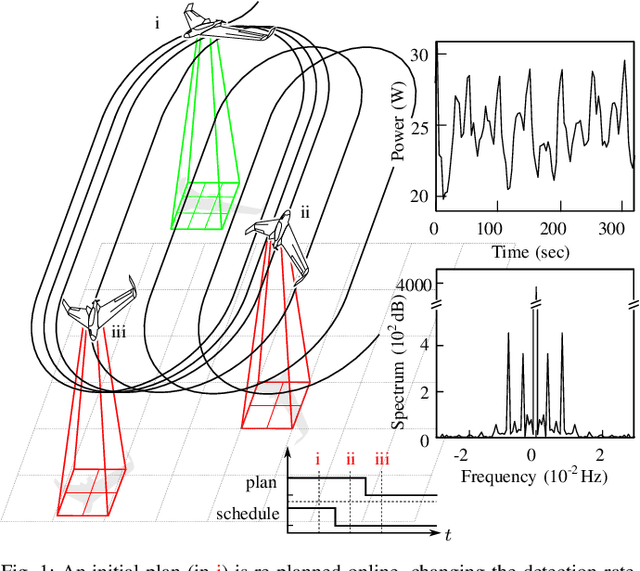
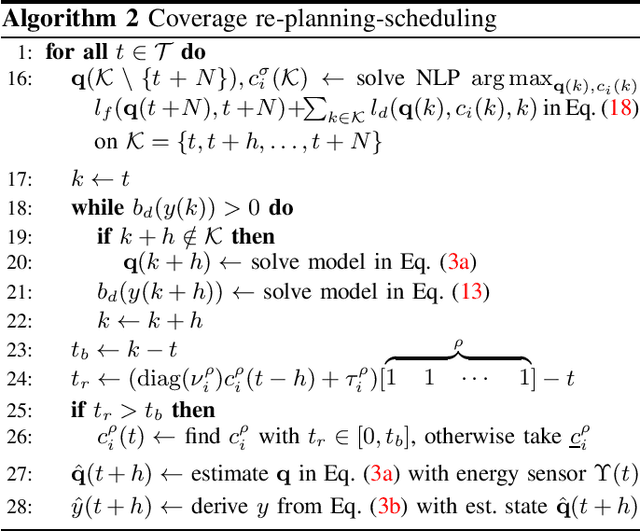
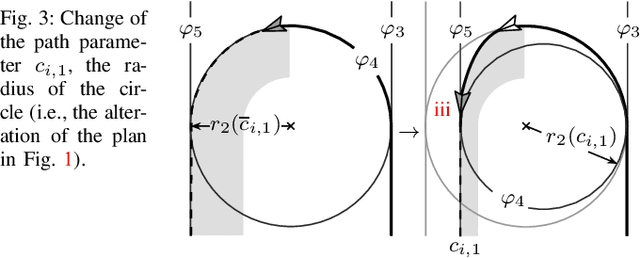
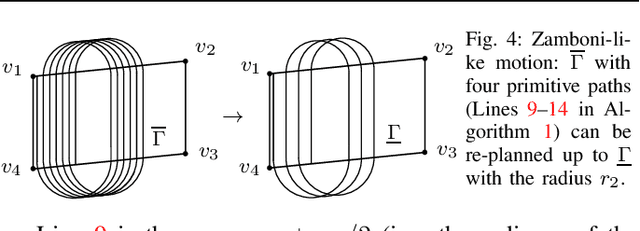
In this paper, we present an online planning-scheduling approach for battery-powered autonomous aerial robots. The approach consists of simultaneously planning a coverage path and scheduling onboard computational tasks. We further derive a novel variable coverage motion robust to airborne constraints and an empirically motivated energy model. The model includes the energy contribution of the schedule based on an automatic computational energy modeling tool. Our experiments show how an initial flight plan is adjusted online as a function of the available battery, accounting for uncertainty. Our approach remedies possible in-flight failure in case of unexpected battery drops, e.g., due to adverse atmospheric conditions, and increases the overall fault tolerance.