 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSim-and-Real Reinforcement Learning for Manipulation: A Consensus-based Approach
Feb 26, 2023Sim-and-real training is a promising alternative to sim-to-real training for robot manipulations. However, the current sim-and-real training is neither efficient, i.e., slow convergence to the optimal policy, nor effective, i.e., sizeable real-world robot data. Given limited time and hardware budgets, the performance of sim-and-real training is not satisfactory. In this paper, we propose a Consensus-based Sim-And-Real deep reinforcement learning algorithm (CSAR) for manipulator pick-and-place tasks, which shows comparable performance in both sim-and-real worlds. In this algorithm, we train the agents in simulators and the real world to get the optimal policies for both sim-and-real worlds. We found two interesting phenomenons: (1) Best policy in simulation is not the best for sim-and-real training. (2) The more simulation agents, the better sim-and-real training. The experimental video is available at: https://youtu.be/mcHJtNIsTEQ.
Drivers' Manoeuvre Modelling and Prediction for Safe HRI
Jun 03, 2021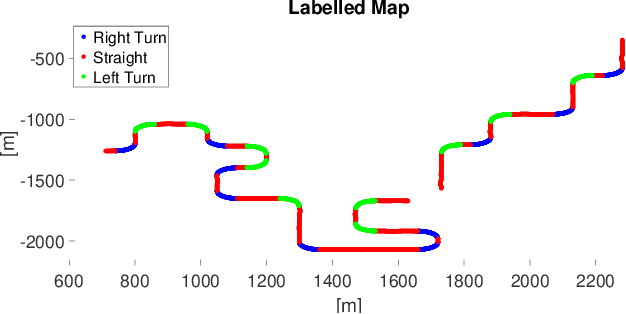
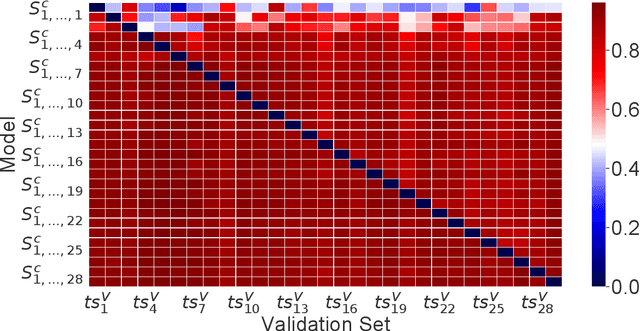
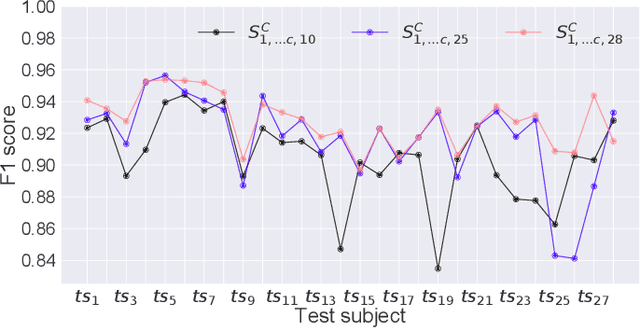
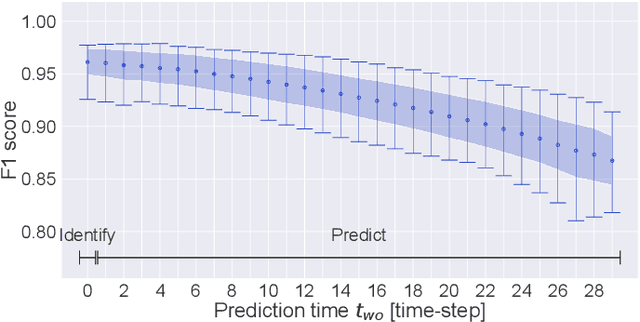
As autonomous machines such as robots and vehicles start performing tasks involving human users, ensuring a safe interaction between them becomes an important issue. Translating methods from human-robot interaction (HRI) studies to the interaction between humans and other highly complex machines (e.g. semi-autonomous vehicles) could help advance the use of those machines in scenarios requiring human interaction. One method involves understanding human intentions and decision-making to estimate the human's present and near-future actions whilst interacting with a robot. This idea originates from the psychological concept of Theory of Mind, which has been broadly explored for robotics and recently for autonomous and semi-autonomous vehicles. In this work, we explored how to predict human intentions before an action is performed by combining data from human-motion, vehicle-state and human inputs (e.g. steering wheel, pedals). A data-driven approach based on Recurrent Neural Network models was used to classify the current driving manoeuvre and to predict the future manoeuvre to be performed. A state-transition model was used with a fixed set of manoeuvres to label data recorded during the trials for real-time applications. Models were trained and tested using drivers of different seat preferences, driving expertise and arm-length; precision and recall metrics over 95% for manoeuvre identification and 86% for manoeuvre prediction were achieved, with prediction time-windows of up to 1 second for both known and unknown test subjects. Compared to our previous results, performance improved and manoeuvre prediction was possible for unknown test subjects without knowing the current manoeuvre.