 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Reinforcement Learning Based Log Loading Automation
Oct 30, 2025Forestry forwarders play a central role in mechanized timber harvesting by picking up and moving logs from the felling site to a processing area or a secondary transport vehicle. Forwarder operation is challenging and physically and mentally exhausting for the operator who must control the machine in remote areas for prolonged periods of time. Therefore, even partial automation of the process may reduce stress on the operator. This study focuses on continuing previous research efforts in application of reinforcement learning agents in automating log handling process, extending the task from grasping which was studied in previous research to full log loading operation. The resulting agent will be capable to automate a full loading procedure from locating and grappling to transporting and delivering the log to a forestry forwarder bed. To train the agent, a trailer type forestry forwarder simulation model in NVIDIA's Isaac Gym and a virtual environment for a typical log loading scenario were developed. With reinforcement learning agents and a curriculum learning approach, the trained agent may be a stepping stone towards application of reinforcement learning agents in automation of the forestry forwarder. The agent learnt grasping a log in a random position from grapple's random position and transport it to the bed with 94% success rate of the best performing agent.
Real-Time Structural Deflection Estimation in Hydraulically Actuated Systems Using 3D Flexible Multibody Simulation and DNNs
Mar 10, 2025The precision, stability, and performance of lightweight high-strength steel structures in heavy machinery is affected by their highly nonlinear dynamics. This, in turn, makes control more difficult, simulation more computationally intensive, and achieving real-time autonomy, using standard approaches, impossible. Machine learning through data-driven, physics-informed and physics-inspired networks, however, promises more computationally efficient and accurate solutions to nonlinear dynamic problems. This study proposes a novel framework that has been developed to estimate real-time structural deflection in hydraulically actuated three-dimensional systems. It is based on SLIDE, a machine-learning-based method to estimate dynamic responses of mechanical systems subjected to forced excitations.~Further, an algorithm is introduced for the data acquisition from a hydraulically actuated system using randomized initial configurations and hydraulic pressures.~The new framework was tested on a hydraulically actuated flexible boom with various sensor combinations and lifting various payloads. The neural network was successfully trained in less time using standard parameters from PyTorch, ADAM optimizer, the various sensor inputs, and minimal output data. The SLIDE-trained neural network accelerated deflection estimation solutions by a factor of $10^7$ in reference to flexible multibody simulation batches and provided reasonable accuracy. These results support the studies goal of providing robust, real-time solutions for control, robotic manipulators, structural health monitoring, and automation problems.
Data-driven simulation for general purpose multibody dynamics using deep neural networks
Sep 02, 2019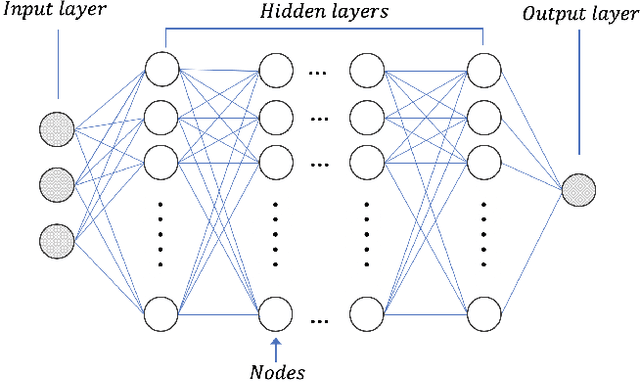
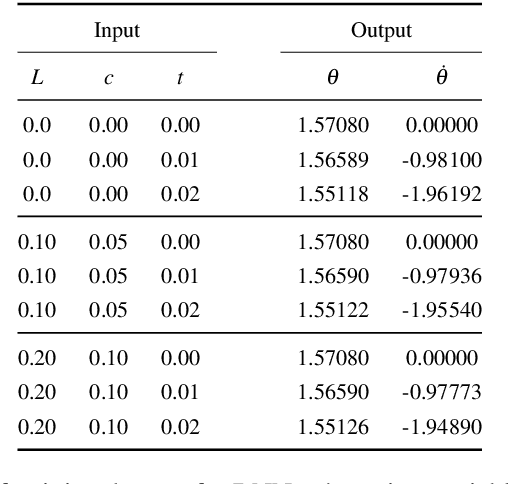
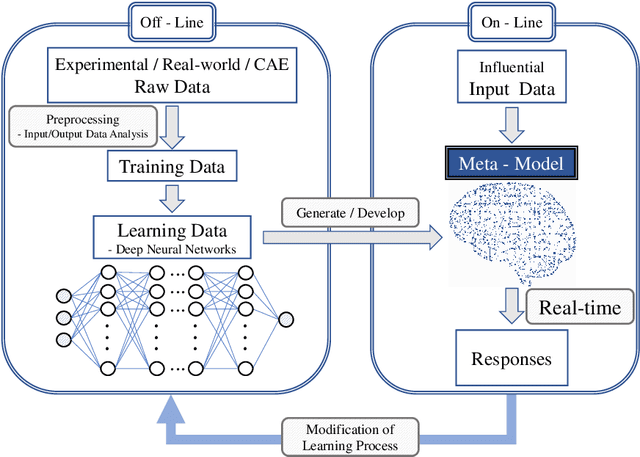
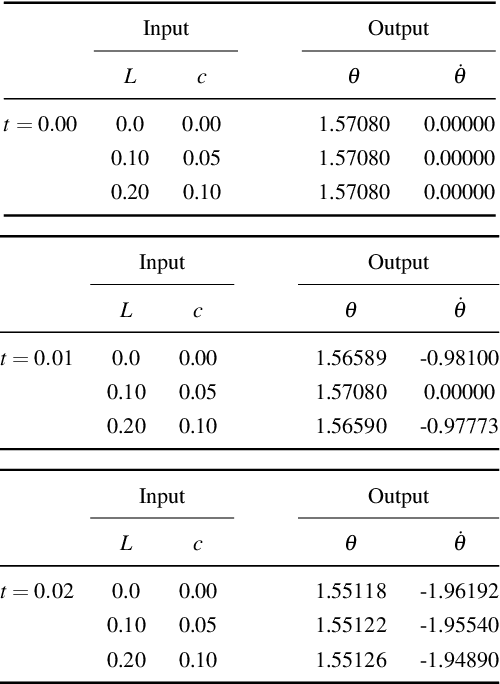
In this paper, a machine learning-based simulation framework of general-purpose multibody dynamics is introduced. The aim of the framework is to generate a well-trained meta-model of multibody dynamics (MBD) systems. To this end, deep neural network (DNN) is employed to the framework so as to construct data-based meta-model representing multibody systems. Constructing well-defined training data set with time variable is essential to get accurate and reliable motion data such as displacement, velocity, acceleration, and forces. As a result of the introduced approach, the meta-model provides motion estimation of system dynamics without solving the analytical equations of motion. The performance of the proposed DNN meta-modeling was evaluated to represent several MBD systems.