 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA GNSS Aided Initial Alignment Method for MEMS-IMU Based on Backtracking Algorithm and Backward Filtering
Feb 28, 2022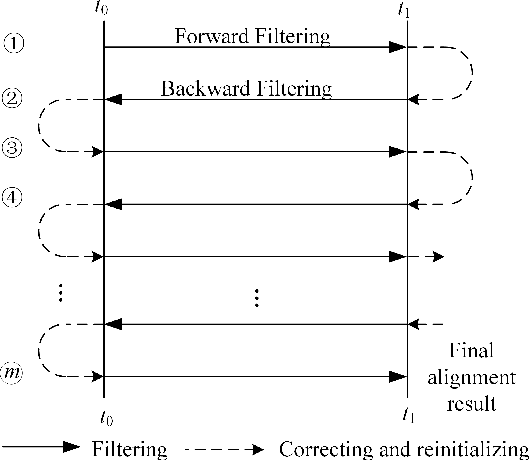
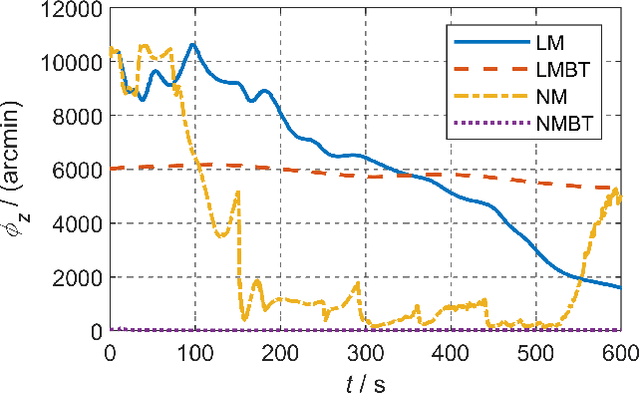
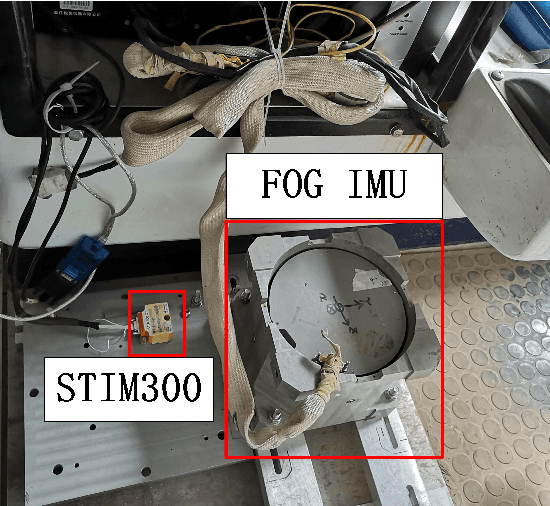
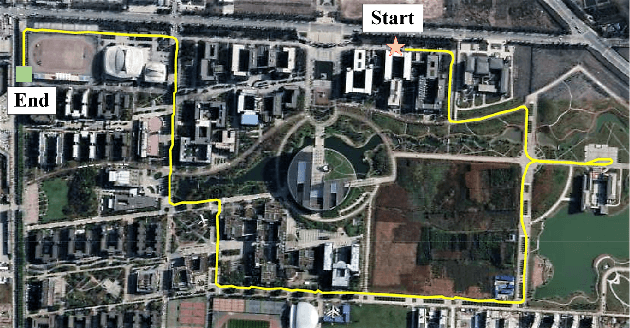
To obtain a high-accuracy position with SINS(Strapdown Inertial Navigation System), initial alignment needs to determine initial attitude rapidly and accurately. High-accuracy grade IMU(Inertial Measurement Uint) can obtain the initial attitude indenpendently, however, the low-accuracy grade gyroscope doesn't adapt to determine the heading angle, hence the initial attitude matrix will not be obtained. If using large misalignment angle model to estiamting heading angle, the convergence time will become much longer. For solving these two problems, a novel alignment algorithm combined backtracking algorithm and reverse navigation updating method with GNSS(Global Navigation Satellite System) aiding is proposed herein. The simulation and land vehicle test were finished to evaluate the alignment accuracy of the proposed algorithm. The horizontal misalignment is less than 2.3 arcmin and the heading misalignment is less than 10.1 arcmin in test. The proposed algorithm is a feasible and practical alignment method for low-cost IMU to obtain initial attitude in short term and large misalignment condition aided by GNSS.
Attitude Reconstruction from Inertial Measurements: QuatFIter and Its Comparison with RodFIter
Jan 11, 2019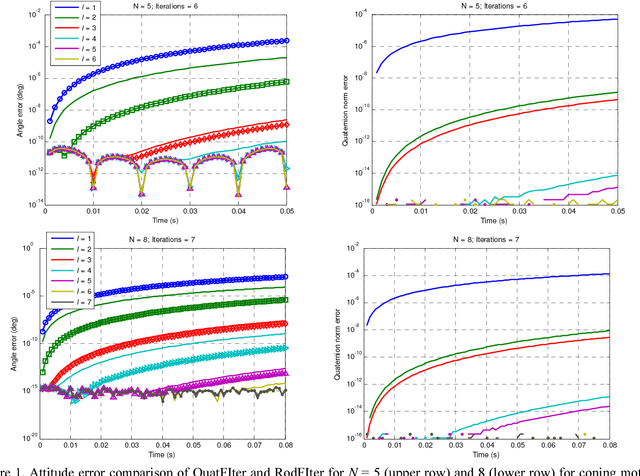
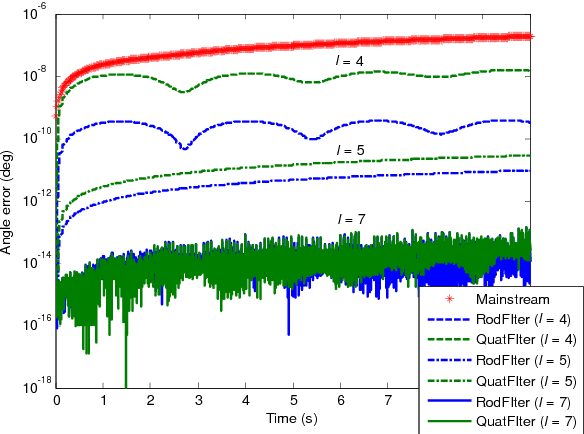
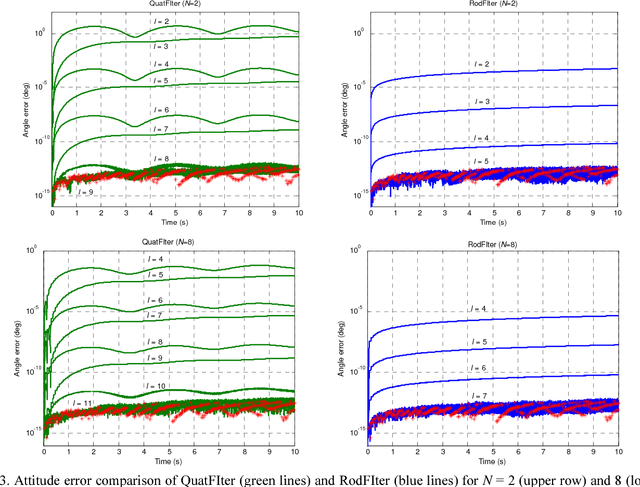
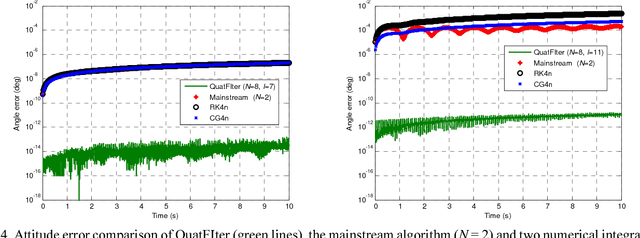
RodFIter is a promising method of attitude reconstruction from inertial measurements based on the functional iterative integration of Rodrigues vector. The Rodrigues vector is used to encode the attitude in place of the popular rotation vector because it has a polynomial-like rate equation and could be cast into theoretically sound and exact integration. This paper further applies the approach of RodFIter to the unity-norm quaternion for attitude reconstruction, named QuatFIter, and shows that it is identical to the previous Picard-type quaternion method. The Chebyshev polynomial approximation and truncation techniques from the RodFIter are exploited to speed up its implementation. Numerical results demonstrate that the QuatFIter is comparable in accuracy to the RodFIter, although its convergence rate is relatively slower with respect to the number of iterations. Notably, the QuatFIter has about two times better computational efficiency, thanks to the linear quaternion kinematic equation.
* 16 pages, 4 figures. arXiv admin note: text overlap with arXiv:1808.03817