 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel Approach for Cancellation of Non-Aligned Inter Spreading Factor Interference in LoRa Systems
Apr 14, 2022
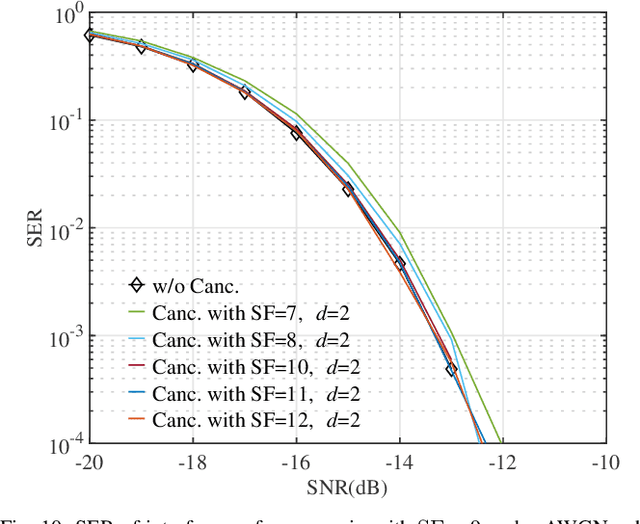
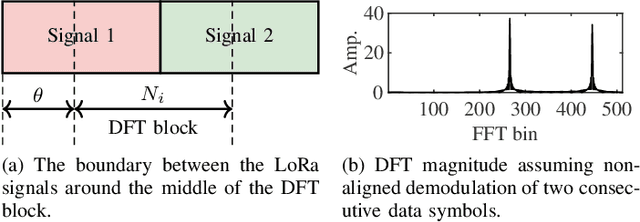
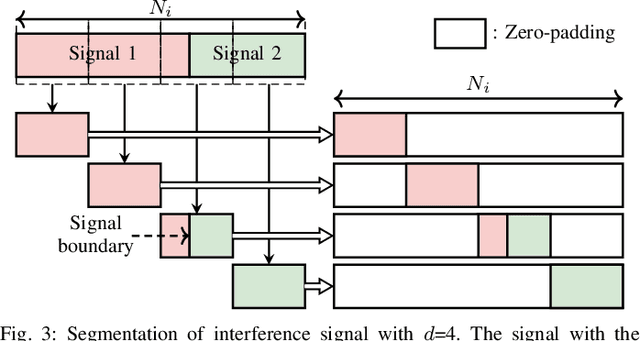
Long Range (LoRa) has become a key enabler technology for low power wide area networks. However, due to its ALOHA-based medium access scheme, LoRa has to cope with collisions that limit the capacity and network scalability. Collisions between randomly overlapped signals modulated with different spreading factors (SFs) result in inter-SF interference, which increases the packet loss likelihood when signal-to-interference ratio (SIR) is low. This issue cannot be resolved by channel coding since the probability of error distance is not concentrated around the adjacent symbol. In this paper, we analytically model this interference, and propose an interference cancellation method based on the idea of segmentation of the received signal. This scheme has three steps. First, the SF of the interference signal is identified, then the equivalent data symbol and complex amplitude of the interference are estimated. Finally, the estimated interference signal is subtracted from the received signal before demodulation. Unlike conventional serial interference cancellation (SIC), this scheme can directly estimate and reconstruct the non-aligned inter-SF interference without synchronization. Simulation results show that the proposed method can significantly reduce the symbol error rate (SER) under low SIR compared with the conventional demodulation. Moreover, it also shows high robustness to fractional sample timing offset (STO) and carrier frequency offset (CFO) of interference. The presented results clearly show the effectiveness of the proposed method in terms of the SER performance.
On the Acquisition of Stationary Signals Using Uniform ADCs
Feb 10, 2022
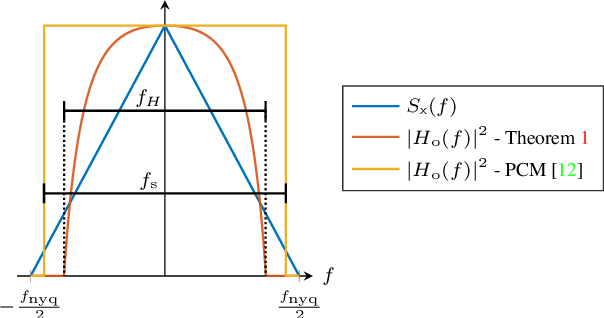
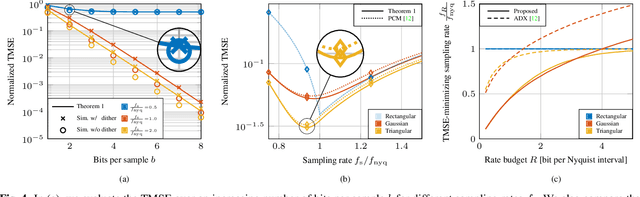
In this work, we consider the acquisition of stationary signals using uniform analog-to-digital converters (ADCs), i.e., employing uniform sampling and scalar uniform quantization. We jointly optimize the pre-sampling and reconstruction filters to minimize the time-averaged mean-squared error (TMSE) in recovering the continuous-time input signal for a fixed sampling rate and quantizer resolution and obtain closed-form expressions for the minimal achievable TMSE. We show that the TMSE-minimizing pre-sampling filter omits aliasing and discards weak frequency components to resolve the remaining ones with higher resolution when the rate budget is small. In our numerical study, we validate our results and show that sub-Nyquist sampling often minimizes the TMSE under tight rate budgets at the output of the ADC.
CNN aided Weighted Interpolation for Channel Estimation in Vehicular Communications
Apr 18, 2021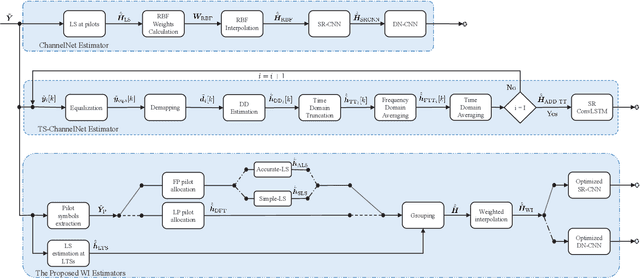
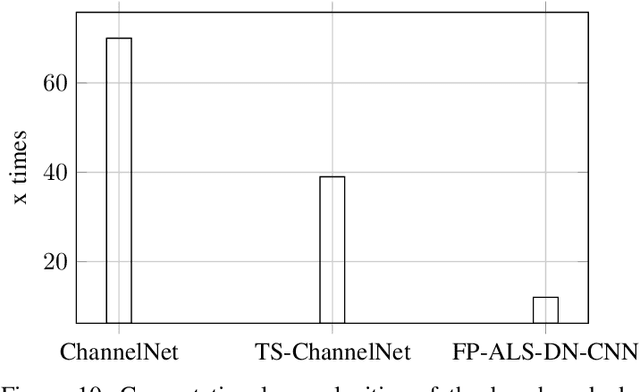
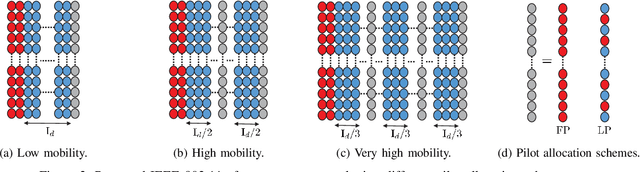
IEEE 802.11p standard defines wireless technology protocols that enable vehicular transportation and manage traffic efficiency. A major challenge in the development of this technology is ensuring communication reliability in highly dynamic vehicular environments, where the wireless communication channels are doubly selective, thus making channel estimation and tracking a relevant problem to investigate. In this paper, a novel deep learning (DL)-based weighted interpolation estimator is proposed to accurately estimate vehicular channels especially in high mobility scenarios. The proposed estimator is based on modifying the pilot allocation of the IEEE 802.11p standard so that more transmission data rates are achieved. Extensive numerical experiments demonstrate that the developed estimator significantly outperforms the recently proposed DL-based frame-by-frame estimators in different vehicular scenarios, while substantially reducing the overall computational complexity.
Channel Estimation for MIMO Space Time Coded OTFS under Doubly Selective Channels
Apr 02, 2021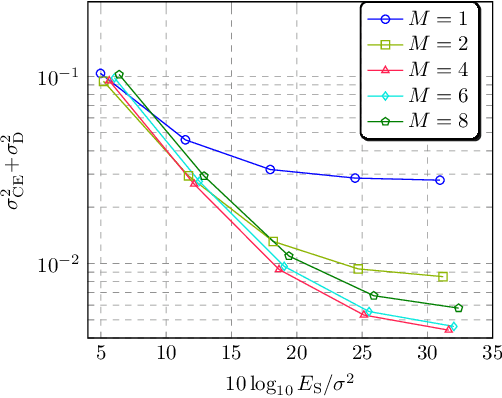
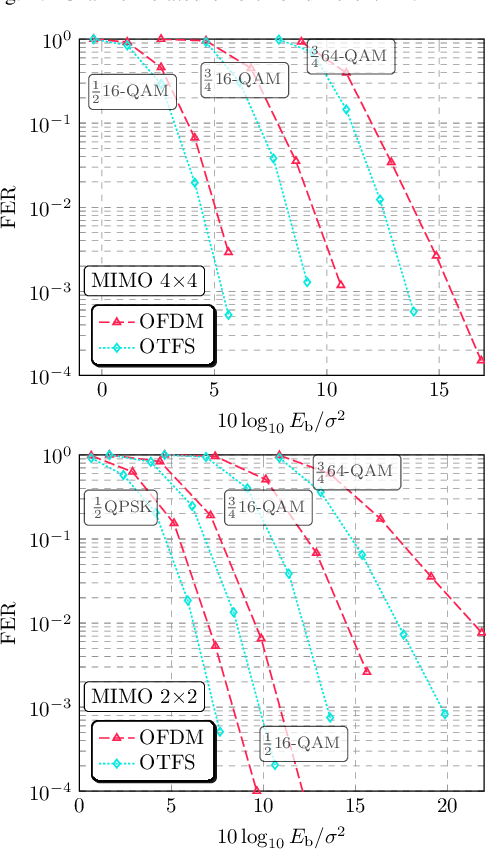
In this paper, we present a unique word (UW)-based channel estimation approach for multiple-input multiple-output (MIMO) systems under doubly dispersive channels, which is applied to orthogonal time frequency space (OTFS) with space time coding (STC). The OTFS modulation has been recently proposed as a robust technique under time varying channels due to its property of spreading the data symbols over time and frequency. Yet another relevant aspect is the employment of multiple antennas at the transmitter and receiver. Therefore, we consider an STC MIMO system with cyclic delay diversity at the transmitter and maximum ratio combining at the receiver, where we develop a UW-based channel estimation scheme for multiple transmit antennas. We show a recently proposed frame optimization scheme for SISO is directly applicable to MIMO. In addition, we evaluate numerically the frame error rate (FER) of OTFS and OFDM with 2x2 and 4x4 MIMO, where the time varying channel is estimated using the UW-based approach. The FER results reveal that OTFS becomes more advantageous than OFDM for MIMO-STC systems with higher order modulation and code rate.
OFDM with Index Modulation in Orbital Angular Momentum Multiplexed Free Space Optical Links
Mar 05, 2021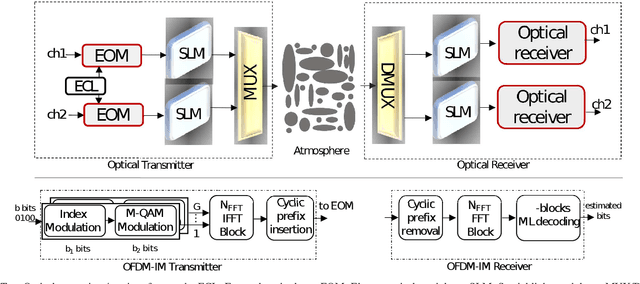
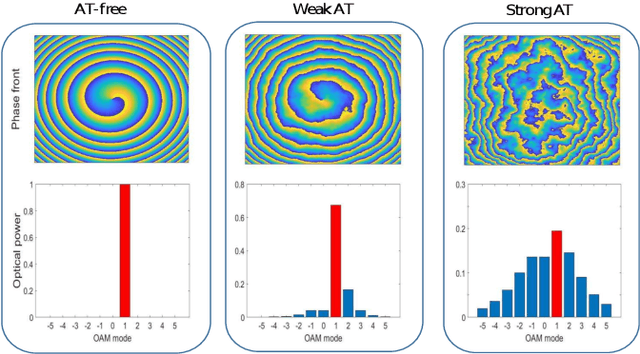
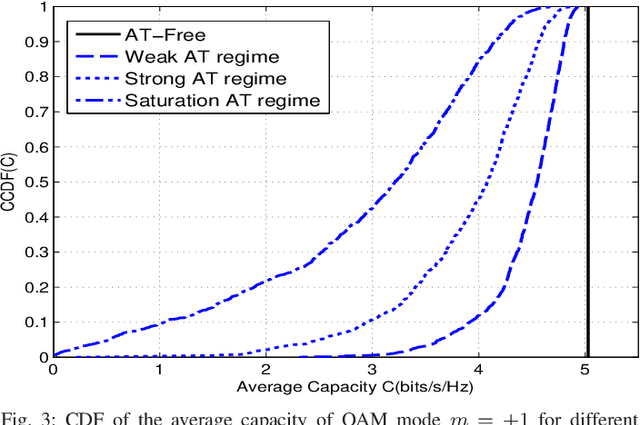
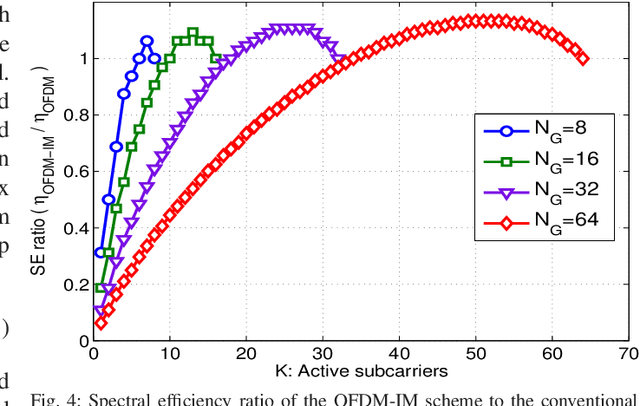
Communication using orbital angular momentum (OAM) modes has recently received a considerable interest in free space optical (FSO) communications. Propagating OAM modes through free space may be subject to atmospheric turbulence (AT) distortions that cause signal attenuation and crosstalk which degrades the system capacity and increases the error probability. In this paper, we propose to enhance the OAM FSO communications in terms of bit error rate and spectral efficiency, for different levels of AT regimes. The performance gain is achieved by introducing orthogonal frequency division multiplexing (OFDM) with index modulation technique to the OAM FSO system.
Alternative Chirp Spread Spectrum Techniques for LPWANs
Feb 18, 2021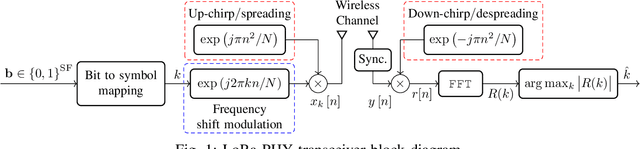
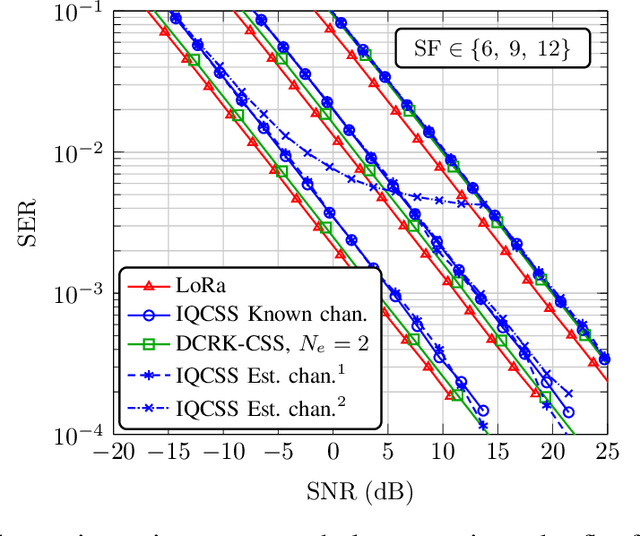
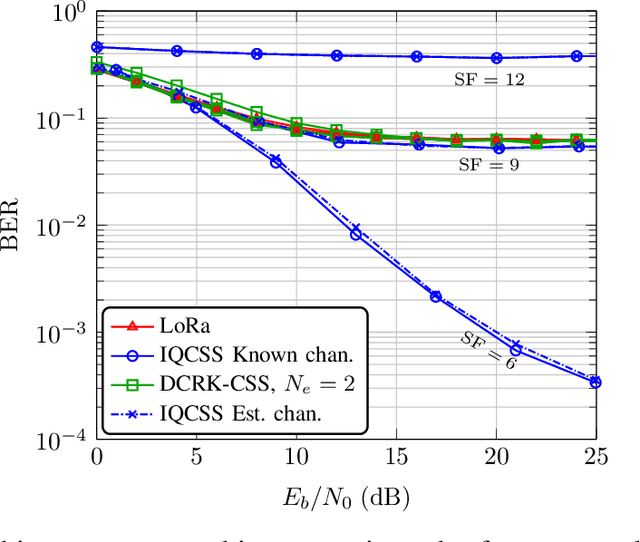
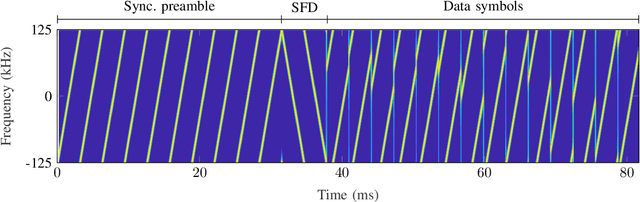
Chirp spread spectrum (CSS) is the modulation technique currently employed by Long-Range (LoRa), which is one of the most prominent Internet of things wireless communications standards. The LoRa physical layer (PHY) employs CSS on top of a variant of frequency shift keying, and non-coherent detection is employed at the receiver. While it offers a good trade-off among coverage, data rate and device simplicity, its maximum achievable data rate is still a limiting factor for some applications. Moreover, the current LoRa standard does not fully exploit the CSS generic case, i.e., when data to be transmitted is encoded in different waveform parameters. Therefore, the goal of this paper is to investigate the performance of CSS while exploring different parameter settings aiming to increase the maximum achievable throughput, and hence increase spectral efficiency. Moreover, coherent and non-coherent reception algorithm design is presented under the framework of maximum likelihood estimation. For the practical receiver design, the formulation of a channel estimation technique is also presented. The performance evaluation of the different variants of CSS is carried out by inspection of the symbol error ratio as a function of the signal-to-noise ratio together with the maximum achievable throughput each scheme can achieve.
Latency Overhead of ROS2 for Modular Time-Critical Systems
Jan 12, 2021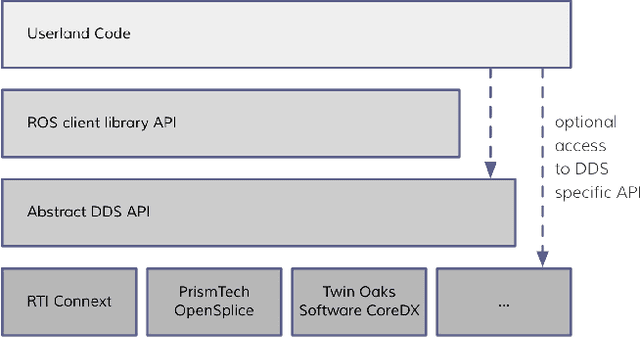
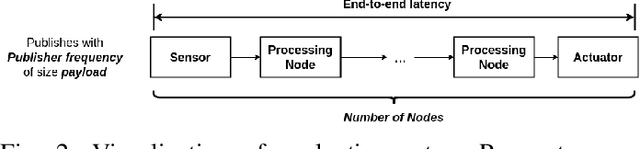
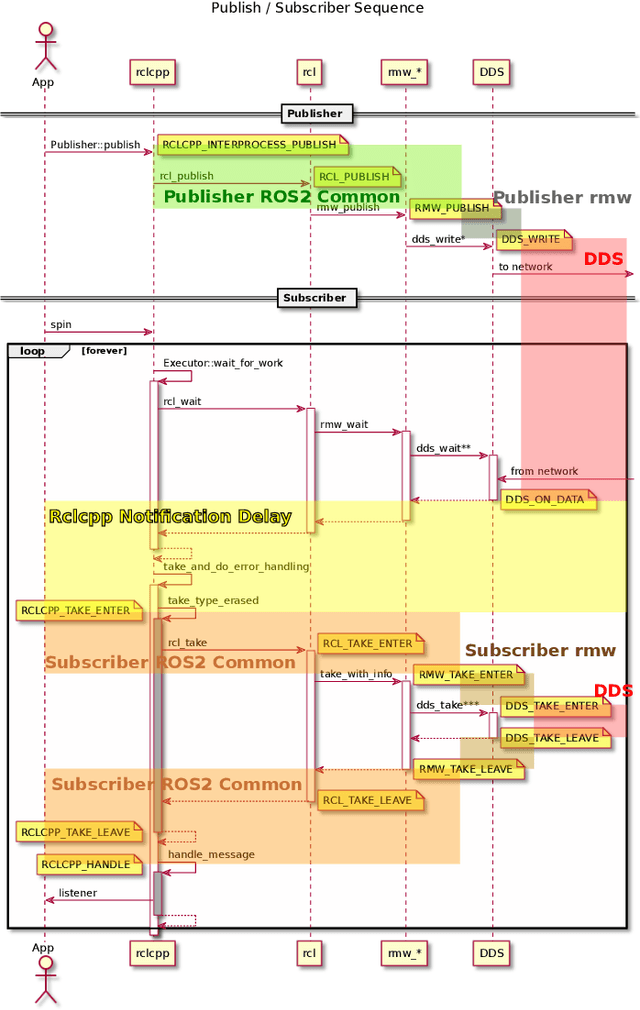
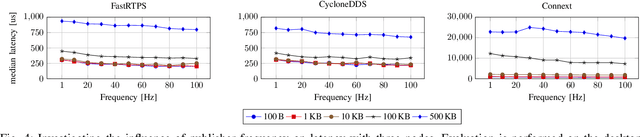
Robot Operating System 2 (ROS2) targets distributed real-time systems. Especially in tight real-time control loops, latency in data processing and communication can lead to instabilities. As ROS2 encourages splitting of the data-processing pipelines into several modules, it is important to understand the latency implications of such modularization. In this paper, we investigate the end-to-end latency of ROS2 data-processing pipeline with different Data Distribution Service (DDS) middlewares. In addition, we profile the ROS2 stack and point out latency bottlenecks. Our findings indicate that end-to-end latency strongly depends on the used DDS middleware. Moreover, we show that ROS2 can lead to 50 % latency overhead compared to using low-level DDS communications. Our results imply guidelines for designing modular ROS2 architectures and indicate possibilities for reducing the ROS2 overhead.
Context-Aware Security for 6G Wireless The Role of Physical Layer Security
Jan 05, 2021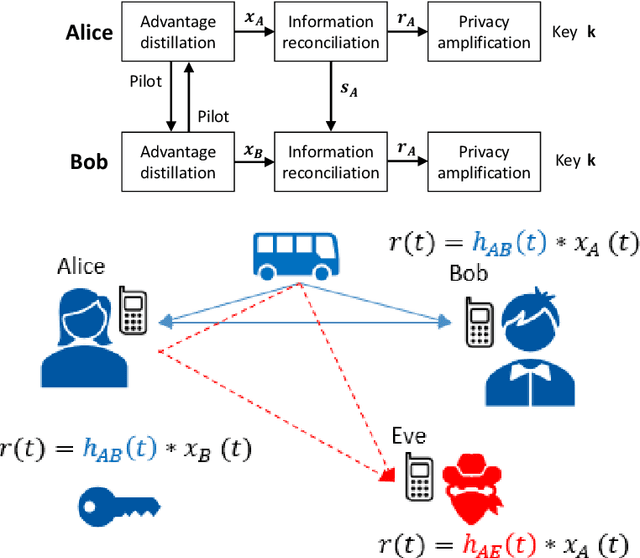
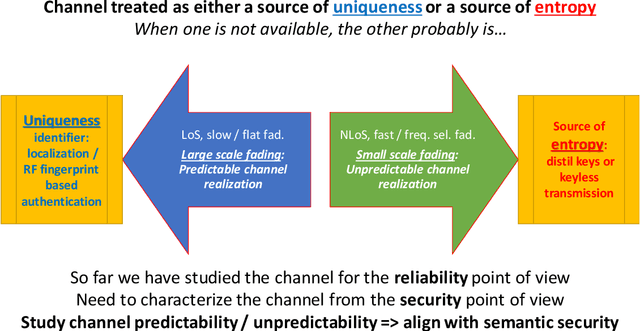
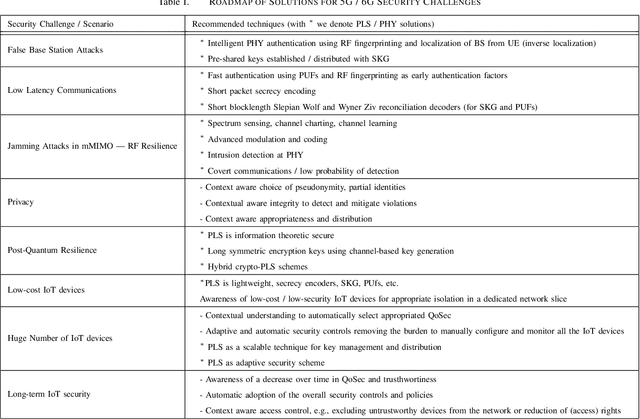
Sixth generation systems are expected to face new security challenges, while opening up new frontiers towards context awareness in the wireless edge. The workhorse behind this projected technological leap will be a whole new set of sensing capabilities predicted for 6G devices, in addition to the ability to achieve high precision localization. The combination of these enhanced traits can give rise to a new breed of context-aware security protocols, following the quality of security (QoSec) paradigm. In this framework, physical layer security solutions emerge as competitive candidates for low complexity, low-delay and low-footprint, adaptive, flexible and context aware security schemes, leveraging the physical layer of the communications in genuinely cross-layer protocols, for the first time.