 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChatterbox-Flash: Prior-Calibrated Block Diffusion for Streaming Zero-Shot TTS
Jun 01, 2026We present Chatterbox-Flash, a zero-shot text-to-speech model obtained by fine-tuning a pretrained autoregressive TTS decoder into a block-diffusion decoder, enabling parallel token generation within each block while retaining block-by-block streaming. We find that naively transferring mainstream block-diffusion decoding to discrete speech tokens degrades quality, as a long-tail token distribution biases parallel position selection toward a few high-frequency tokens. To mitigate this without architectural modification, we introduce two inference-time techniques: prior-calibrated scoring, which subtracts the block-level marginal token distribution, and an early-decoding schedule, which adaptively terminates iteration based on calibrated confidence. On standard zero-shot TTS benchmarks, Chatterbox-Flash attains high-fidelity synthesis comparable to strong autoregressive and non-autoregressive baselines, while supporting streaming inference with time-to-first-packet on par with streaming AR systems and substantially lower real-time factor. Code and audio samples are available at https://github.com/resemble-ai/chatterbox-flash.
SEED: Speaker Embedding Enhancement Diffusion Model
May 22, 2025A primary challenge when deploying speaker recognition systems in real-world applications is performance degradation caused by environmental mismatch. We propose a diffusion-based method that takes speaker embeddings extracted from a pre-trained speaker recognition model and generates refined embeddings. For training, our approach progressively adds Gaussian noise to both clean and noisy speaker embeddings extracted from clean and noisy speech, respectively, via forward process of a diffusion model, and then reconstructs them to clean embeddings in the reverse process. While inferencing, all embeddings are regenerated via diffusion process. Our method needs neither speaker label nor any modification to the existing speaker recognition pipeline. Experiments on evaluation sets simulating environment mismatch scenarios show that our method can improve recognition accuracy by up to 19.6% over baseline models while retaining performance on conventional scenarios. We publish our code here https://github.com/kaistmm/seed-pytorch
N-ImageNet: Towards Robust, Fine-Grained Object Recognition with Event Cameras
Dec 02, 2021

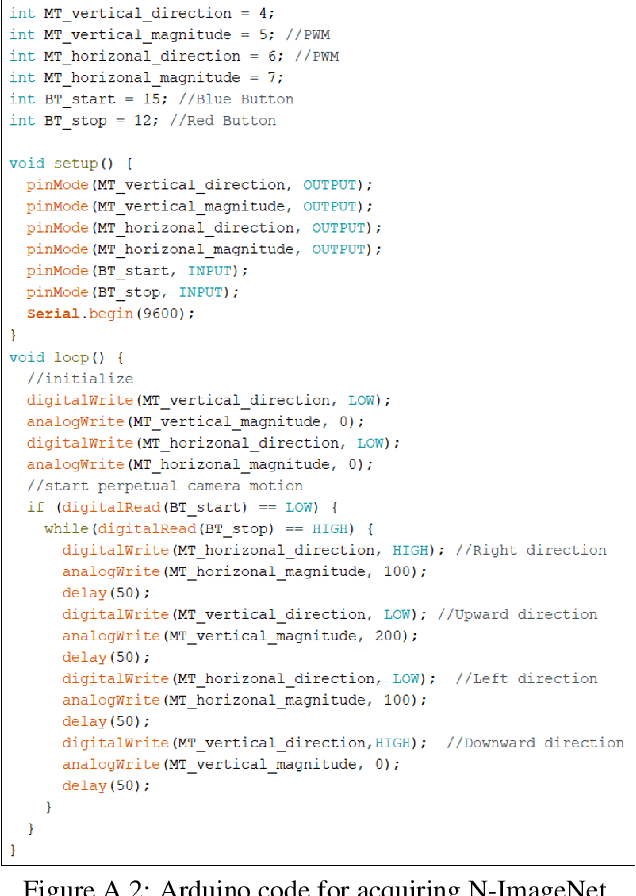

We introduce N-ImageNet, a large-scale dataset targeted for robust, fine-grained object recognition with event cameras. The dataset is collected using programmable hardware in which an event camera consistently moves around a monitor displaying images from ImageNet. N-ImageNet serves as a challenging benchmark for event-based object recognition, due to its large number of classes and samples. We empirically show that pretraining on N-ImageNet improves the performance of event-based classifiers and helps them learn with few labeled data. In addition, we present several variants of N-ImageNet to test the robustness of event-based classifiers under diverse camera trajectories and severe lighting conditions, and propose a novel event representation to alleviate the performance degradation. To the best of our knowledge, we are the first to quantitatively investigate the consequences caused by various environmental conditions on event-based object recognition algorithms. N-ImageNet and its variants are expected to guide practical implementations for deploying event-based object recognition algorithms in the real world.