 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDEKC: Data-Enable Control for Tethered Space Robot Deployment in the Presence of Uncertainty via Koopman Operator Theory
Jun 10, 2025This work focuses the deployment of tethered space robot in the presence of unknown uncertainty. A data-enable framework called DEKC which contains offline training part and online execution part is proposed to deploy tethered space robot in the presence of uncertainty. The main idea of this work is modeling the unknown uncertainty as a dynamical system, which enables high accuracy and convergence of capturing uncertainty. The core part of proposed framework is a proxy model of uncertainty, which is derived from data-driven Koopman theory and is separated with controller design. In the offline stage, the lifting functions associated with Koopman operator are parameterized with deep neural networks. Then by solving an optimization problem, the lifting functions are learned from sampling data. In the online execution stage, the proxy model cooperates the learned lifting functions obtained in the offline phase to capture the unknown uncertainty. Then the output of proxy model is compensated to the baseline controller such that the effect of uncertainty can be attenuated or even eliminated. Furthermore, considering some scenarios in which the performance of proxy model may weaken, a receding-horizon scheme is proposed to update the proxy model online. Finally, the extensive numerical simulations demonstrate the effectiveness of our proposed framework. The implementation of proposed DEKC framework is publicly available at https://github.com/NPU-RCIR/DEKC.git.
A Novel Learning-based Global Path Planning Algorithm for Planetary Rovers
Nov 23, 2018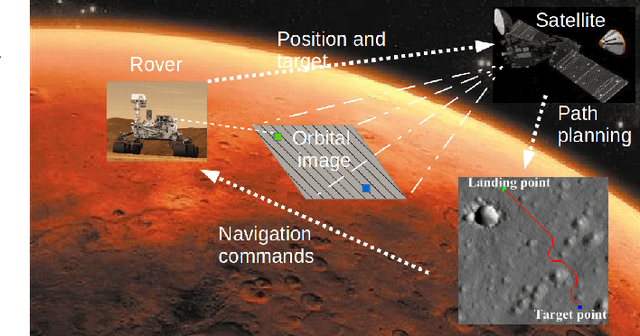
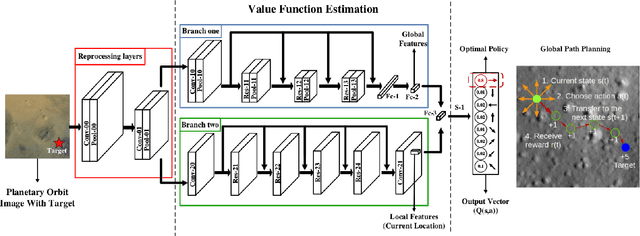
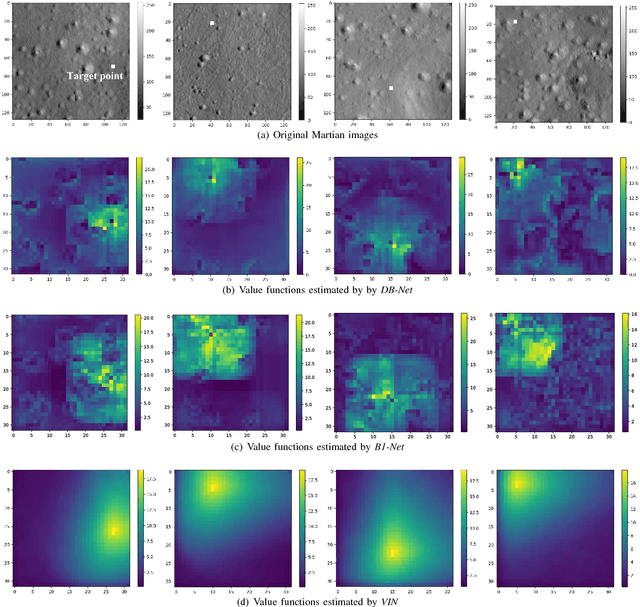
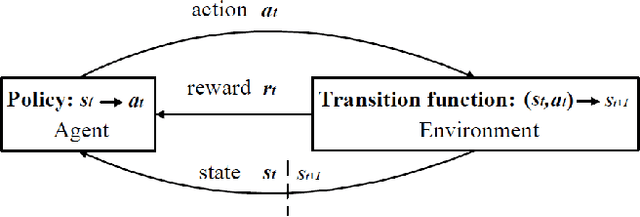
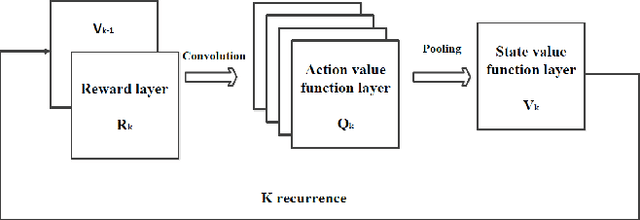
Autonomous path planning algorithms are significant to planetary exploration rovers, since relying on commands from Earth will heavily reduce their efficiency of executing exploration missions. This paper proposes a novel learning-based algorithm to deal with global path planning problem for planetary exploration rovers. Specifically, a novel deep convolutional neural network with double branches (DB-CNN) is designed and trained, which can plan path directly from orbital images of planetary surfaces without implementing environment mapping. Moreover, the planning procedure requires no prior knowledge about planetary surface terrains. Finally, experimental results demonstrate that DB-CNN achieves better performance on global path planning and faster convergence during training compared with the existing Value Iteration Network (VIN).
A Novel Deep Neural Network Architecture for Mars Visual Navigation
Aug 25, 2018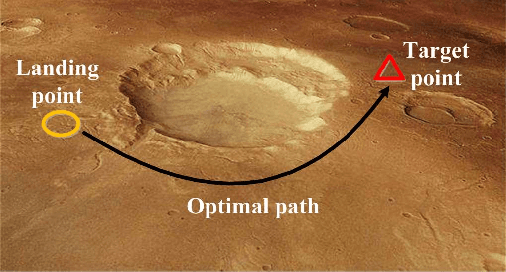
In this paper, emerging deep learning techniques are leveraged to deal with Mars visual navigation problem. Specifically, to achieve precise landing and autonomous navigation, a novel deep neural network architecture with double branches and non-recurrent structure is designed, which can represent both global and local deep features of Martian environment images effectively. By employing this architecture, Mars rover can determine the optimal navigation policy to the target point directly from original Martian environment images. Moreover, compared with the existing state-of-the-art algorithm, the training time is reduced by 45.8%. Finally, experiment results demonstrate that the proposed deep neural network architecture achieves better performance and faster convergence than the existing ones and generalizes well to unknown environment.