 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoboCup Rescue 2025 Team Description Paper UruBots
Apr 14, 2025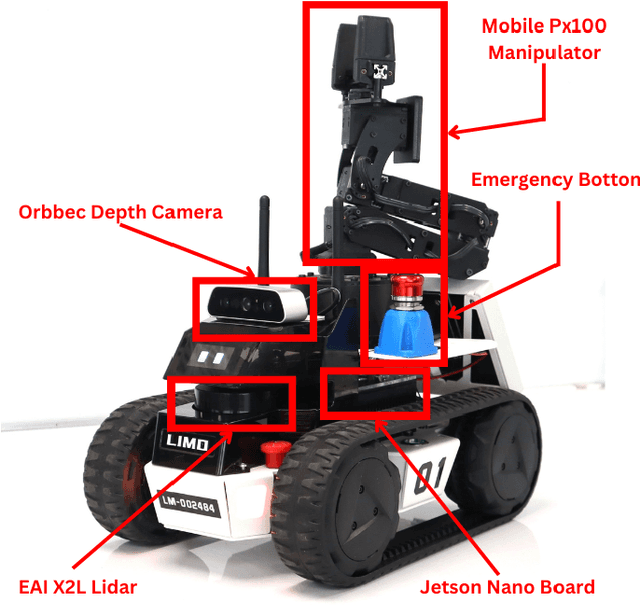
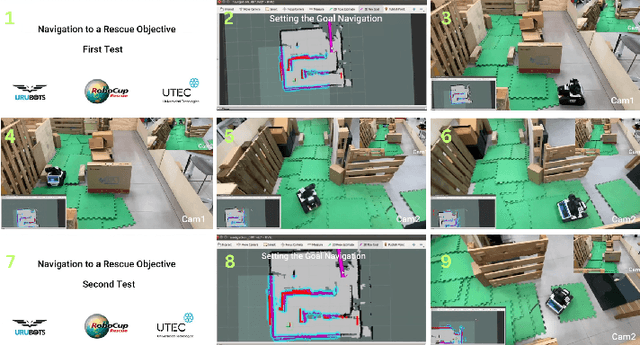
This paper describes the approach used by Team UruBots for participation in the 2025 RoboCup Rescue Robot League competition. Our team aims to participate for the first time in this competition at RoboCup, using experience learned from previous competitions and research. We present our vehicle and our approach to tackle the task of detecting and finding victims in search and rescue environments. Our approach contains known topics in robotics, such as ROS, SLAM, Human Robot Interaction and segmentation and perception. Our proposed approach is open source, available to the RoboCup Rescue community, where we aim to learn and contribute to the league.
UruBots RoboCup Work Team Description Paper
Apr 13, 2025



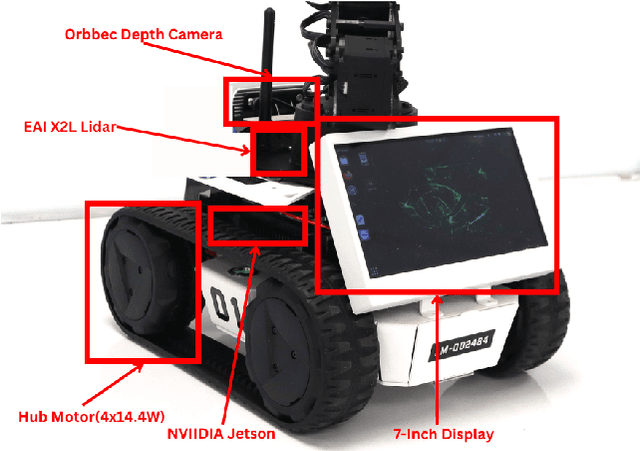
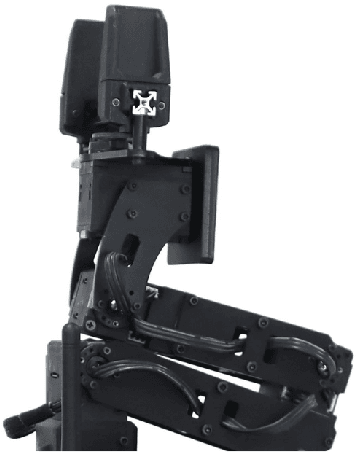
This work presents a team description paper for the RoboCup Work League. Our team, UruBots, has been developing robots and projects for research and competitions in the last three years, attending robotics competitions in Uruguay and around the world. In this instance, we aim to participate and contribute to the RoboCup Work category, hopefully making our debut in this prestigious competition. For that, we present an approach based on the Limo robot, whose main characteristic is its hybrid locomotion system with wheels and tracks, with some extras added by the team to complement the robot's functionalities. Overall, our approach allows the robot to efficiently and autonomously navigate a Work scenario, with the ability to manipulate objects, perform autonomous navigation, and engage in a simulated industrial environment.
UruBots Autonomous Car Team Two: Team Description Paper for FIRA 2024
Jun 13, 2024



This paper proposes a mini autonomous car to be used by the team UruBots for the 2024 FIRA Autonomous Cars Race Challenge. The vehicle is proposed focusing on a low cost and light weight setup. Powered by a Raspberry PI4 and with a total weight of 1.15 Kilograms, we show that our vehicle manages to race a track of approximately 13 meters in 11 seconds at the best evaluation that was carried out, with an average speed of 1.2m/s in average. That performance was achieved after training a convolutional neural network with 1500 samples for a total amount of 60 epochs. Overall, we believe that our vehicle are suited to perform at the FIRA Autonomous Cars Race Challenge 2024, helping the development of the field of study and the category in the competition.