 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCharacterizing Healthy & Post-Stroke Neuromotor Behavior During 6D Upper-Limb Isometric Gaming: Implications for Design of End-Effector Rehabilitation Robot Interfaces
Mar 10, 2026Successful robot-mediated rehabilitation requires designing games and robot interventions that promote healthy motor practice. However, the interplay between a given user's neuromotor behavior, the gaming interface, and the physical robot makes designing system elements -- and even characterizing what behaviors are "healthy" or pathological -- challenging. We leverage our OpenRobotRehab 1.0 open access data set to assess the characteristics of 13 healthy and 2 post-stroke users' force output, muscle activations, and game performance while executing isometric trajectory tracking tasks using an end-effector rehabilitation robot. We present an assessment of how subtle aspects of interface design impact user behavior; an analysis of how pathological neuromotor behaviors are reflected in end-effector force dynamics; and a novel hidden Markov model (HMM)-based neuromotor behavior classification method based on surface electromyography (sEMG) signals during cyclic motions. We demonstrate that task specification (including which axes are constrained and how users interpret tracking instructions) shapes user behavior; that pathology-related features are detectable in 6D end-effector force data during isometric task execution (with significant differences between healthy and post-stroke profiles in force error and average force production at $p=0.05$); and that healthy neuromotor strategies are heterogeneous and inherently difficult to characterize. We also show that our HMM-based models discriminate healthy and post-stroke neuromotor dynamics where synergy-based decompositions reflect no such differentiation. Lastly, we discuss these results' implications for the design of adaptive end-effector rehabilitation robots capable of promoting healthier movement strategies across diverse user populations.
Spectral Mixture Kernels for Multi-Output Gaussian Processes
Nov 03, 2017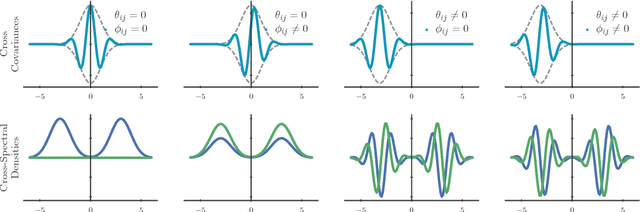
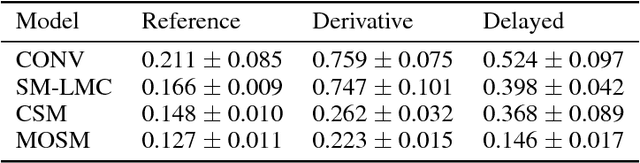
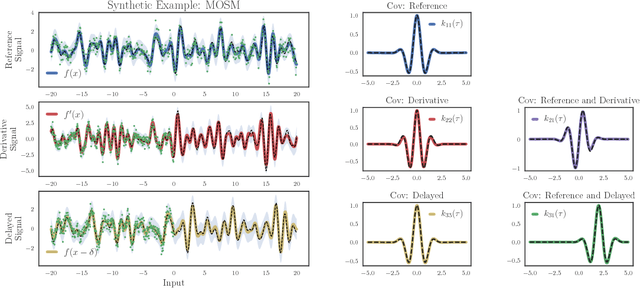

Early approaches to multiple-output Gaussian processes (MOGPs) relied on linear combinations of independent, latent, single-output Gaussian processes (GPs). This resulted in cross-covariance functions with limited parametric interpretation, thus conflicting with the ability of single-output GPs to understand lengthscales, frequencies and magnitudes to name a few. On the contrary, current approaches to MOGP are able to better interpret the relationship between different channels by directly modelling the cross-covariances as a spectral mixture kernel with a phase shift. We extend this rationale and propose a parametric family of complex-valued cross-spectral densities and then build on Cram\'er's Theorem (the multivariate version of Bochner's Theorem) to provide a principled approach to design multivariate covariance functions. The so-constructed kernels are able to model delays among channels in addition to phase differences and are thus more expressive than previous methods, while also providing full parametric interpretation of the relationship across channels. The proposed method is first validated on synthetic data and then compared to existing MOGP methods on two real-world examples.