 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Bayesian Estimation for Dynamic Treatment Regimes with a Long Follow-up Time
Sep 20, 2021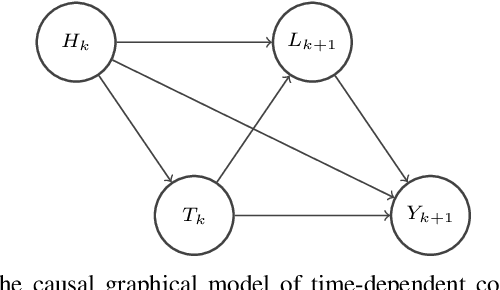
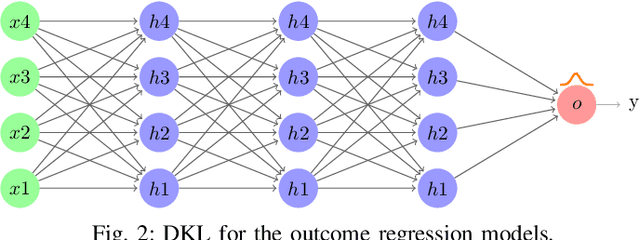
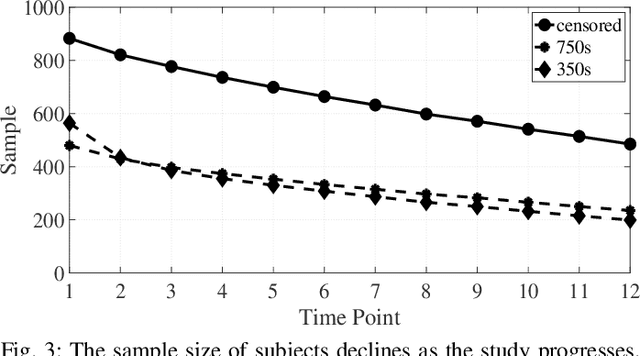
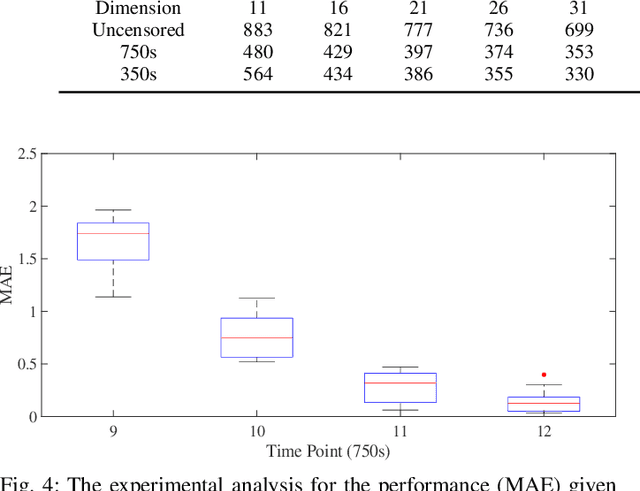
Causal effect estimation for dynamic treatment regimes (DTRs) contributes to sequential decision making. However, censoring and time-dependent confounding under DTRs are challenging as the amount of observational data declines over time due to a reducing sample size but the feature dimension increases over time. Long-term follow-up compounds these challenges. Another challenge is the highly complex relationships between confounders, treatments, and outcomes, which causes the traditional and commonly used linear methods to fail. We combine outcome regression models with treatment models for high dimensional features using uncensored subjects that are small in sample size and we fit deep Bayesian models for outcome regression models to reveal the complex relationships between confounders, treatments, and outcomes. Also, the developed deep Bayesian models can model uncertainty and output the prediction variance which is essential for the safety-aware applications, such as self-driving cars and medical treatment design. The experimental results on medical simulations of HIV treatment show the ability of the proposed method to obtain stable and accurate dynamic causal effect estimation from observational data, especially with long-term follow-up. Our technique provides practical guidance for sequential decision making, and policy-making.
Causal Discovery from Incomplete Data using An Encoder and Reinforcement Learning
Jun 09, 2020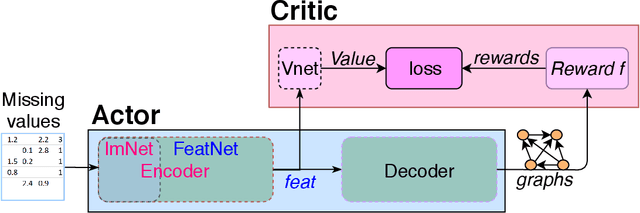
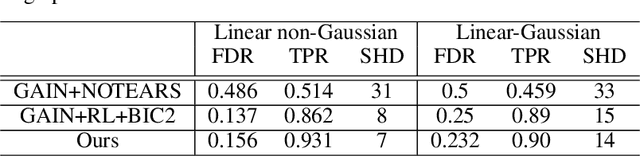
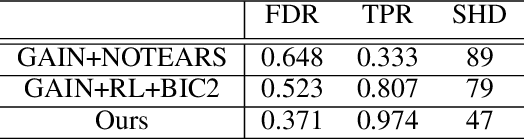
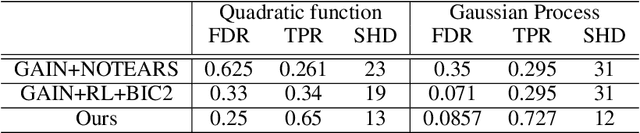
Discovering causal structure among a set of variables is a fundamental problem in many domains. However, state-of-the-art methods seldom consider the possibility that the observational data has missing values (incomplete data), which is ubiquitous in many real-world situations. The missing value will significantly impair the performance and even make the causal discovery algorithms fail. In this paper, we propose an approach to discover causal structures from incomplete data by using a novel encoder and reinforcement learning (RL). The encoder is designed for missing data imputation as well as feature extraction. In particular, it learns to encode the currently available information (with missing values) into a robust feature representation which is then used to determine where to search the best graph. The encoder is integrated into a RL framework that can be optimized using the actor-critic algorithm. Our method takes the incomplete observational data as input and generates a causal structure graph. Experimental results on synthetic and real data demonstrate that our method can robustly generate causal structures from incomplete data. Compared with the direct combination of data imputation and causal discovery methods, our method performs generally better and can even obtain a performance gain as much as 43.2%.