 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBirdRecorder's AI on Sky: Safeguarding birds of prey by detection and classification of tiny objects around wind turbines
Aug 25, 2025



The urgent need for renewable energy expansion, particularly wind power, is hindered by conflicts with wildlife conservation. To address this, we developed BirdRecorder, an advanced AI-based anti-collision system to protect endangered birds, especially the red kite (Milvus milvus). Integrating robotics, telemetry, and high-performance AI algorithms, BirdRecorder aims to detect, track, and classify avian species within a range of 800 m to minimize bird-turbine collisions. BirdRecorder integrates advanced AI methods with optimized hardware and software architectures to enable real-time image processing. Leveraging Single Shot Detector (SSD) for detection, combined with specialized hardware acceleration and tracking algorithms, our system achieves high detection precision while maintaining the speed necessary for real-time decision-making. By combining these components, BirdRecorder outperforms existing approaches in both accuracy and efficiency. In this paper, we summarize results on field tests and performance of the BirdRecorder system. By bridging the gap between renewable energy expansion and wildlife conservation, BirdRecorder contributes to a more sustainable coexistence of technology and nature.
Efficient Baseline-free Sampling in Parameter Exploring Policy Gradients: Super Symmetric PGPE
Dec 13, 2013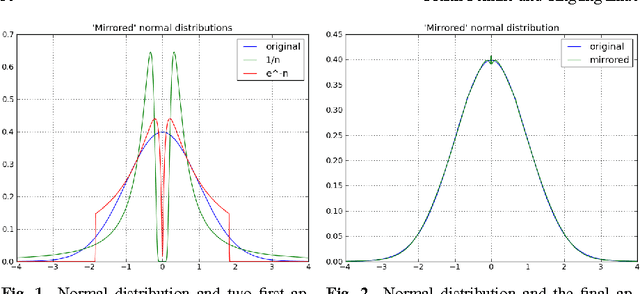
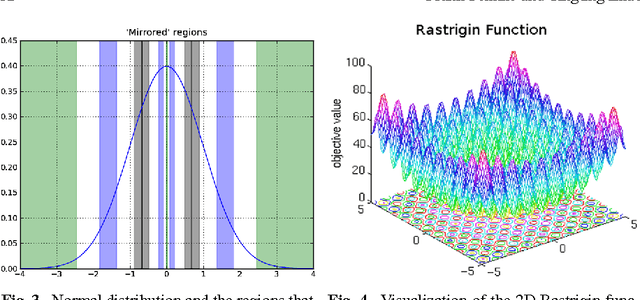
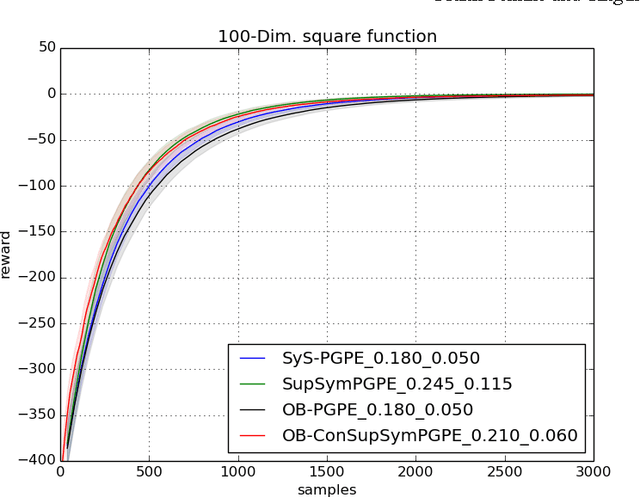
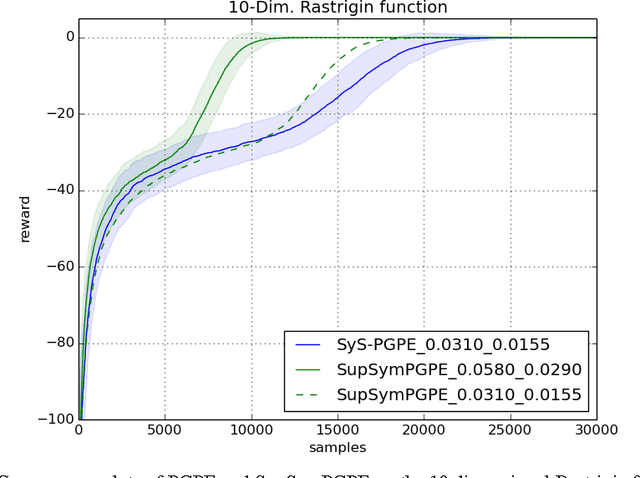
Policy Gradient methods that explore directly in parameter space are among the most effective and robust direct policy search methods and have drawn a lot of attention lately. The basic method from this field, Policy Gradients with Parameter-based Exploration, uses two samples that are symmetric around the current hypothesis to circumvent misleading reward in \emph{asymmetrical} reward distributed problems gathered with the usual baseline approach. The exploration parameters are still updated by a baseline approach - leaving the exploration prone to asymmetric reward distributions. In this paper we will show how the exploration parameters can be sampled quasi symmetric despite having limited instead of free parameters for exploration. We give a transformation approximation to get quasi symmetric samples with respect to the exploration without changing the overall sampling distribution. Finally we will demonstrate that sampling symmetrically also for the exploration parameters is superior in needs of samples and robustness than the original sampling approach.