 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow to craft a deep reinforcement learning policy for wind farm flow control
Jun 06, 2025Within wind farms, wake effects between turbines can significantly reduce overall energy production. Wind farm flow control encompasses methods designed to mitigate these effects through coordinated turbine control. Wake steering, for example, consists in intentionally misaligning certain turbines with the wind to optimize airflow and increase power output. However, designing a robust wake steering controller remains challenging, and existing machine learning approaches are limited to quasi-static wind conditions or small wind farms. This work presents a new deep reinforcement learning methodology to develop a wake steering policy that overcomes these limitations. Our approach introduces a novel architecture that combines graph attention networks and multi-head self-attention blocks, alongside a novel reward function and training strategy. The resulting model computes the yaw angles of each turbine, optimizing energy production in time-varying wind conditions. An empirical study conducted on steady-state, low-fidelity simulation, shows that our model requires approximately 10 times fewer training steps than a fully connected neural network and achieves more robust performance compared to a strong optimization baseline, increasing energy production by up to 14 %. To the best of our knowledge, this is the first deep reinforcement learning-based wake steering controller to generalize effectively across any time-varying wind conditions in a low-fidelity, steady-state numerical simulation setting.
Double InfoGAN for Contrastive Analysis
Jan 31, 2024Contrastive Analysis (CA) deals with the discovery of what is common and what is distinctive of a target domain compared to a background one. This is of great interest in many applications, such as medical imaging. Current state-of-the-art (SOTA) methods are latent variable models based on VAE (CA-VAEs). However, they all either ignore important constraints or they don't enforce fundamental assumptions. This may lead to sub-optimal solutions where distinctive factors are mistaken for common ones (or viceversa). Furthermore, the generated images have a rather poor quality, typical of VAEs, decreasing their interpretability and usefulness. Here, we propose Double InfoGAN, the first GAN based method for CA that leverages the high-quality synthesis of GAN and the separation power of InfoGAN. Experimental results on four visual datasets, from simple synthetic examples to complex medical images, show that the proposed method outperforms SOTA CA-VAEs in terms of latent separation and image quality. Datasets and code are available online.
Evaluating Robustness over High Level Driving Instruction for Autonomous Driving
May 20, 2021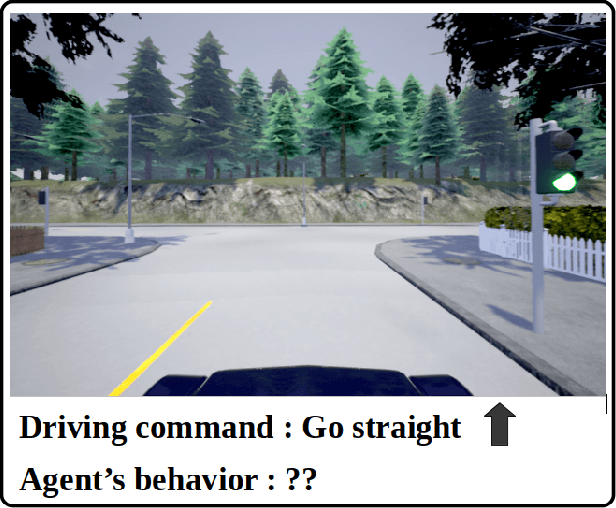
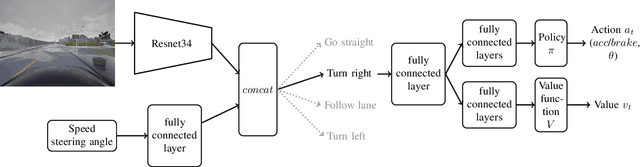
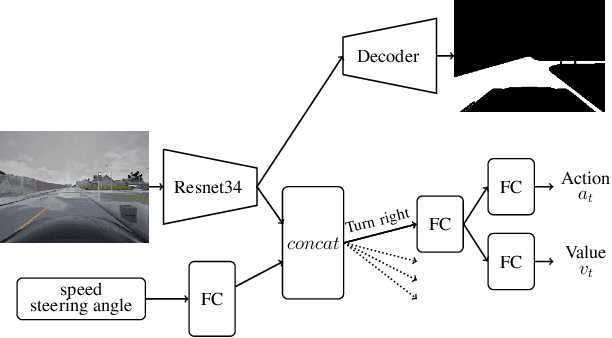
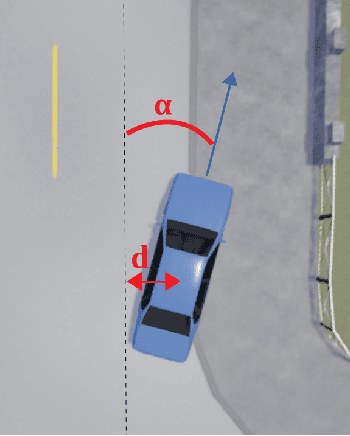
In recent years, we have witnessed increasingly high performance in the field of autonomous end-to-end driving. In particular, more and more research is being done on driving in urban environments, where the car has to follow high level commands to navigate. However, few evaluations are made on the ability of these agents to react in an unexpected situation. Specifically, no evaluations are conducted on the robustness of driving agents in the event of a bad high-level command. We propose here an evaluation method, namely a benchmark that allows to assess the robustness of an agent, and to appreciate its understanding of the environment through its ability to keep a safe behavior, regardless of the instruction.