 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNOVA: Symbolic Regression Discovery of Interpretable Car-Following and Lane-Change Models with Driver Heterogeneity
Jun 09, 2026We present NOVA, an autonomous symbolic regression framework that identifies interpretable car-following and lane-change structures from raw trajectory data with minimal behavioral priors. Applied to 4,765,788 active driving observations from the NGSIM I-80 and US-101 datasets, NOVA's deterministic Rust-powered search engine evaluates over 10,000 candidate algebraic structures and identifies a compact two-term acceleration model under a forward-shifted rolling-mean prediction target. Evaluated under two complementary preprocessing pipelines, NOVA achieves $RMSE = 1.376 m/s^2$ ($R^2 = 15.57\%$) on the intent-forecasting benchmark, outperforming the best recalibrated symbolic-regression baseline (SR-LLM, PNAS~2025) by 0.135 m/s$^2$ in RMSE under an identical evaluation protocol. Across eight independent experiments, a single dominant nonlinear term emerges as a robust backbone of human car-following; a residual-guided extension further links the selected structure to an established psychophysical theory of collision avoidance. The discovered feature operators transfer zero-shot between freeway sites with under 3 pp $R^2$ loss. Extended to lane-change modelling within a multinomial logit framework, NOVA achieves 67.4\% balanced accuracy under strict vehicle-ID holdout on 502 unseen drivers, surpassing existing lane-changing baselines by +29.8 percentage points on a three-class problem.
Visual Place Representation and Recognition from Depth Images
Dec 27, 2021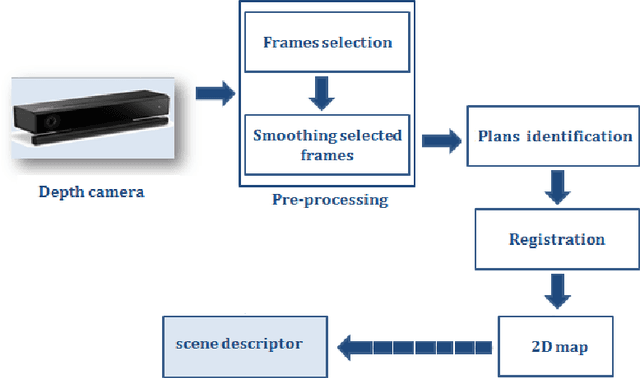
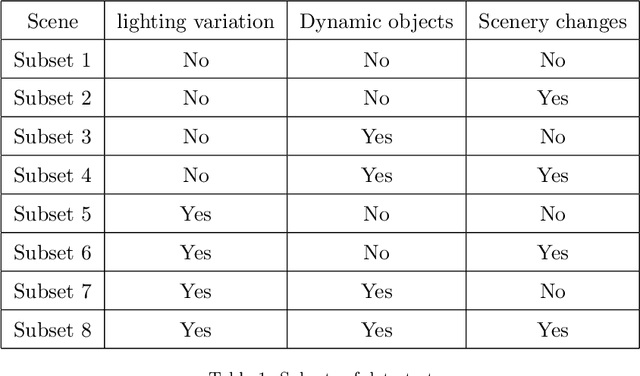
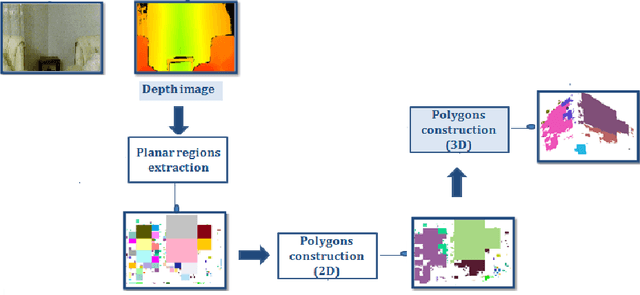
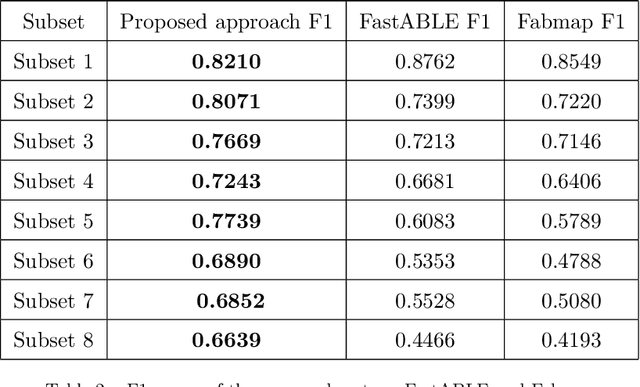
This work proposes a new method for place recognition based on the scene architecture. From depth video, we compute the 3D model and we derive and describe geometrically the 2D map from which the scene descriptor is deduced to constitute the core of the proposed algorithm. The obtained results show the efficiency and the robustness of the propounded descriptor to scene appearance changes and light variations.