 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNOVA: Symbolic Regression Discovery of Interpretable Car-Following and Lane-Change Models with Driver Heterogeneity
Jun 09, 2026We present NOVA, an autonomous symbolic regression framework that identifies interpretable car-following and lane-change structures from raw trajectory data with minimal behavioral priors. Applied to 4,765,788 active driving observations from the NGSIM I-80 and US-101 datasets, NOVA's deterministic Rust-powered search engine evaluates over 10,000 candidate algebraic structures and identifies a compact two-term acceleration model under a forward-shifted rolling-mean prediction target. Evaluated under two complementary preprocessing pipelines, NOVA achieves $RMSE = 1.376 m/s^2$ ($R^2 = 15.57\%$) on the intent-forecasting benchmark, outperforming the best recalibrated symbolic-regression baseline (SR-LLM, PNAS~2025) by 0.135 m/s$^2$ in RMSE under an identical evaluation protocol. Across eight independent experiments, a single dominant nonlinear term emerges as a robust backbone of human car-following; a residual-guided extension further links the selected structure to an established psychophysical theory of collision avoidance. The discovered feature operators transfer zero-shot between freeway sites with under 3 pp $R^2$ loss. Extended to lane-change modelling within a multinomial logit framework, NOVA achieves 67.4\% balanced accuracy under strict vehicle-ID holdout on 502 unseen drivers, surpassing existing lane-changing baselines by +29.8 percentage points on a three-class problem.
Deep Reinforcement Q-Learning for Intelligent Traffic Signal Control with Partial Detection
Sep 29, 2021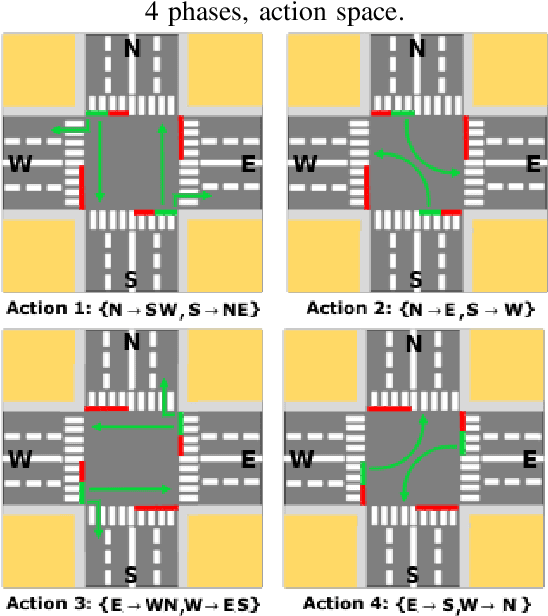
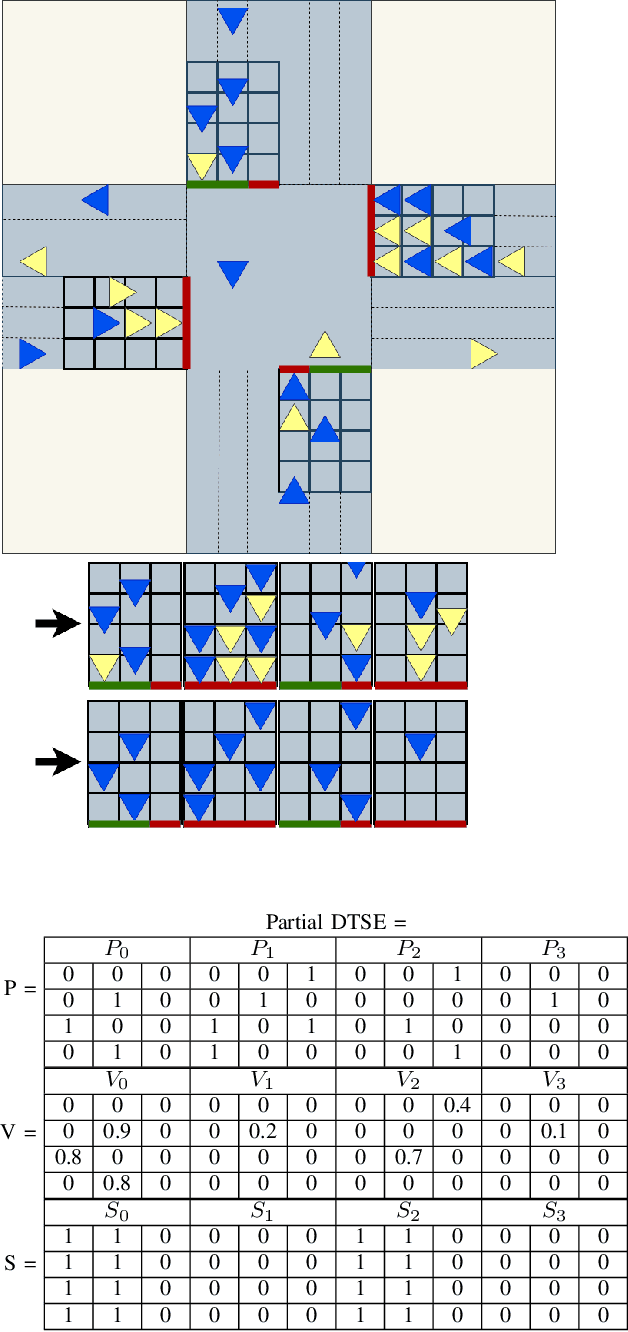
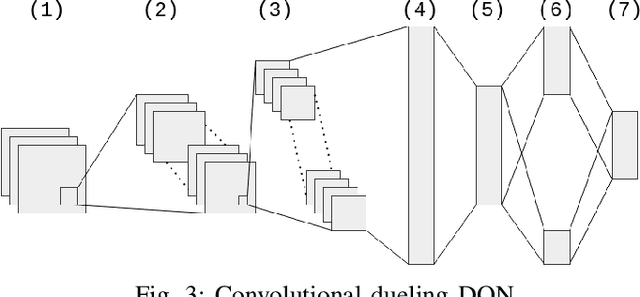
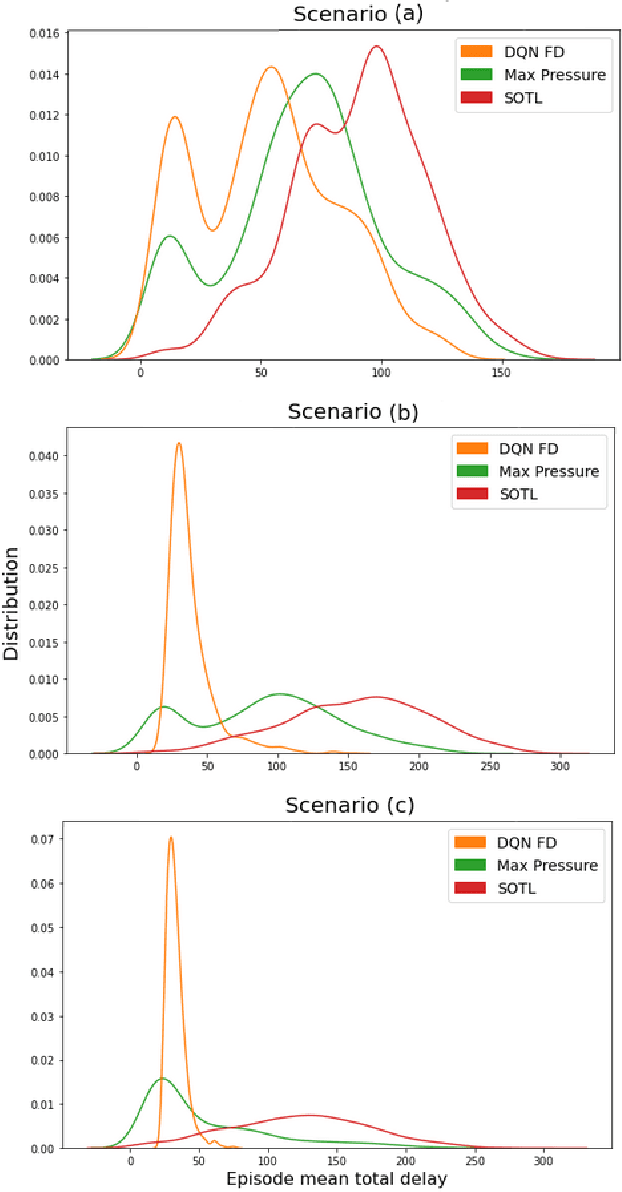
Intelligent traffic signal controllers, applying DQN algorithms to traffic light policy optimization, efficiently reduce traffic congestion by adjusting traffic signals to real-time traffic. Most propositions in the literature however consider that all vehicles at the intersection are detected, an unrealistic scenario. Recently, new wireless communication technologies have enabled cost-efficient detection of connected vehicles by infrastructures. With only a small fraction of the total fleet currently equipped, methods able to perform under low detection rates are desirable. In this paper, we propose a deep reinforcement Q-learning model to optimize traffic signal control at an isolated intersection, in a partially observable environment with connected vehicles. First, we present the novel DQN model within the RL framework. We introduce a new state representation for partially observable environments and a new reward function for traffic signal control, and provide a network architecture and tuned hyper-parameters. Second, we evaluate the performances of the model in numerical simulations on multiple scenarios, in two steps. At first in full detection against existing actuated controllers, then in partial detection with loss estimates for proportions of connected vehicles. Finally, from the obtained results, we define thresholds for detection rates with acceptable and optimal performance levels.