 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIn-process 3D Deviation Mapping and Defect Monitoring (3D-DM2) in High Production-rate Robotic Additive Manufacturing
Nov 06, 2025



Additive manufacturing (AM) is an emerging digital manufacturing technology to produce complex and freeform objects through a layer-wise deposition. High deposition rate robotic AM (HDRRAM) processes, such as cold spray additive manufacturing (CSAM), offer significantly increased build speeds by delivering large volumes of material per unit time. However, maintaining shape accuracy remains a critical challenge, particularly due to process instabilities in current open-loop systems. Detecting these deviations as they occur is essential to prevent error propagation, ensure part quality, and minimize post-processing requirements. This study presents a real-time monitoring system to acquire and reconstruct the growing part and directly compares it with a near-net reference model to detect the shape deviation during the manufacturing process. The early identification of shape inconsistencies, followed by segmenting and tracking each deviation region, paves the way for timely intervention and compensation to achieve consistent part quality.
Cable Driven Rehabilitation Robots: Comparison of Applications and Control Strategies
Aug 05, 2021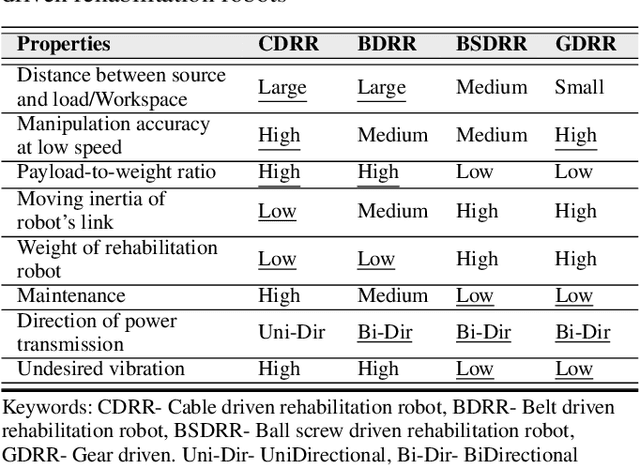
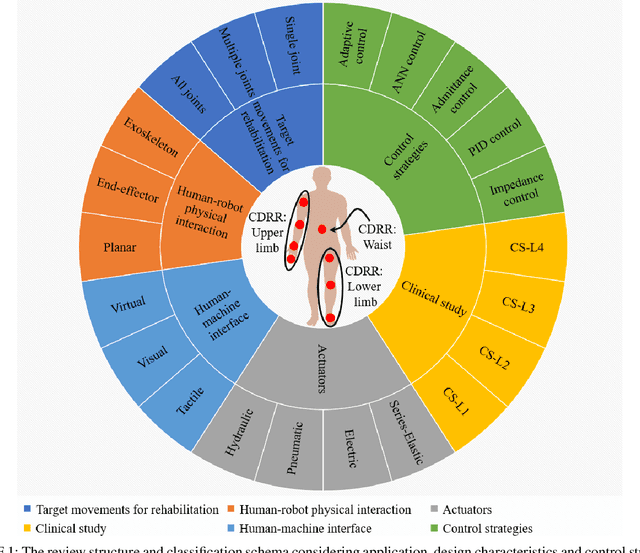
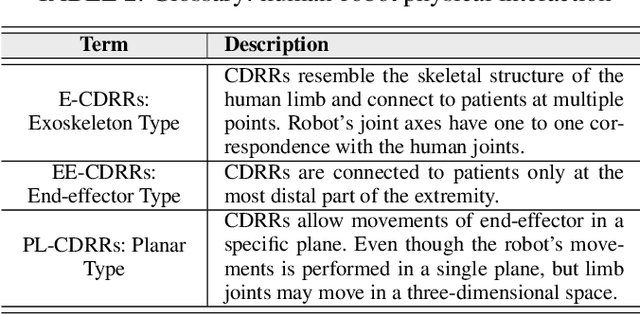
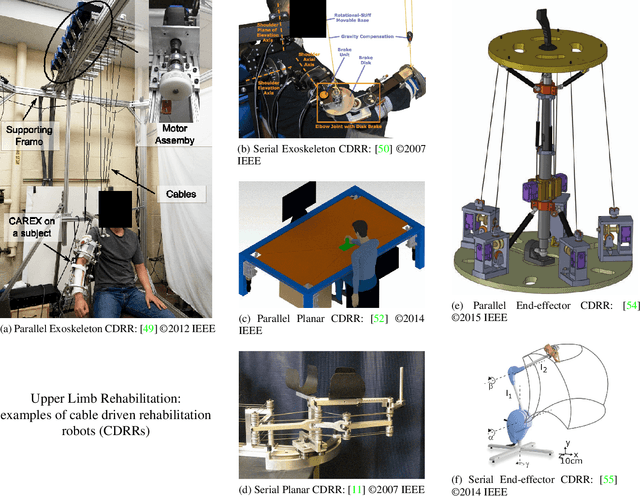
Significant attention has been paid to robotic rehabilitation using various types of actuator and power transmission. Amongst those, cable-driven rehabilitation robots (CDRRs) are relatively newer and their control strategies have been evolving in recent years. CDRRs offer several promising features, such as low inertia, lightweight, high payload-to-weight ratio, large work-space and configurability. In this paper, we categorize and review the cable-driven rehabilitation robots in three main groups concerning their applications for upper limb, lower limb, and waist rehabilitation. For each group, target movements are identified, and promising designs of CDRRs are analyzed in terms of types of actuators, controllers and their interactions with humans. Particular attention has been given to robots with verified clinical performance in actual rehabilitation settings. A large part of this paper is dedicated to comparing the control strategies and techniques of CDRRs under five main categories of: Impedance-based, PID-based, Admittance-based, Assist-as-needed (AAN) and Adaptive controllers. We have carefully contrasted the advantages and disadvantages of those methods with the aim of assisting the design of future CDRRs