 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvent-Only Drone Trajectory Forecasting with RPM-Modulated Kalman Filtering
Mar 02, 2026Event cameras provide high-temporal-resolution visual sensing that is well suited for observing fast-moving aerial objects; however, their use for drone trajectory prediction remains limited. This work introduces an event-only drone forecasting method that exploits propeller-induced motion cues. Propeller rotational speed are extracted directly from raw event data and fused within an RPM-aware Kalman filtering framework. Evaluations on the FRED dataset show that the proposed method outperforms learning-based approaches and vanilla kalman filter in terms of average distance error and final distance error at 0.4s and 0.8s forecasting horizons. The results demonstrate robust and accurate short- and medium-horizon trajectory forecasting without reliance on RGB imagery or training data.
Automatic Labelling for Low-Light Pedestrian Detection
Jul 03, 2025Pedestrian detection in RGB images is a key task in pedestrian safety, as the most common sensor in autonomous vehicles and advanced driver assistance systems is the RGB camera. A challenge in RGB pedestrian detection, that does not appear to have large public datasets, is low-light conditions. As a solution, in this research, we propose an automated infrared-RGB labeling pipeline. The proposed pipeline consists of 1) Infrared detection, where a fine-tuned model for infrared pedestrian detection is used 2) Label transfer process from the infrared detections to their RGB counterparts 3) Training object detection models using the generated labels for low-light RGB pedestrian detection. The research was performed using the KAIST dataset. For the evaluation, object detection models were trained on the generated autolabels and ground truth labels. When compared on a previously unseen image sequence, the results showed that the models trained on generated labels outperformed the ones trained on ground-truth labels in 6 out of 9 cases for the mAP@50 and mAP@50-95 metrics. The source code for this research is available at https://github.com/BouzoulasDimitrios/IR-RGB-Automated-LowLight-Pedestrian-Labeling
Label Correction for Road Segmentation Using Road-side Cameras
Feb 03, 2025Reliable road segmentation in all weather conditions is critical for intelligent transportation applications, autonomous vehicles and advanced driver's assistance systems. For robust performance, all weather conditions should be included in the training data of deep learning-based perception models. However, collecting and annotating such a dataset requires extensive resources. In this paper, existing roadside camera infrastructure is utilized for collecting road data in varying weather conditions automatically. Additionally, a novel semi-automatic annotation method for roadside cameras is proposed. For each camera, only one frame is labeled manually and then the label is transferred to other frames of that camera feed. The small camera movements between frames are compensated using frequency domain image registration. The proposed method is validated with roadside camera data collected from 927 cameras across Finland over 4 month time period during winter. Training on the semi-automatically labeled data boosted the segmentation performance of several deep learning segmentation models. Testing was carried out on two different datasets to evaluate the robustness of the resulting models. These datasets were an in-domain roadside camera dataset and out-of-domain dataset captured with a vehicle on-board camera.
Trajectory-based Road Autolabeling with Lidar-Camera Fusion in Winter Conditions
Dec 03, 2024



Robust road segmentation in all road conditions is required for safe autonomous driving and advanced driver assistance systems. Supervised deep learning methods provide accurate road segmentation in the domain of their training data but cannot be trusted in out-of-distribution scenarios. Including the whole distribution in the trainset is challenging as each sample must be labeled by hand. Trajectory-based self-supervised methods offer a potential solution as they can learn from the traversed route without manual labels. However, existing trajectory-based methods use learning schemes that rely only on the camera or only on the lidar. In this paper, trajectory-based learning is implemented jointly with lidar and camera for increased performance. Our method outperforms recent standalone camera- and lidar-based methods when evaluated with a challenging winter driving dataset including countryside and suburb driving scenes. The source code is available at https://github.com/eerik98/lidar-camera-road-autolabeling.git
Road Surface Friction Estimation for Winter Conditions Utilising General Visual Features
Apr 25, 2024In below freezing winter conditions, road surface friction can greatly vary based on the mixture of snow, ice, and water on the road. Friction between the road and vehicle tyres is a critical parameter defining vehicle dynamics, and therefore road surface friction information is essential to acquire for several intelligent transportation applications, such as safe control of automated vehicles or alerting drivers of slippery road conditions. This paper explores computer vision-based evaluation of road surface friction from roadside cameras. Previous studies have extensively investigated the application of convolutional neural networks for the task of evaluating the road surface condition from images. Here, we propose a hybrid deep learning architecture, WCamNet, consisting of a pretrained visual transformer model and convolutional blocks. The motivation of the architecture is to combine general visual features provided by the transformer model, as well as finetuned feature extraction properties of the convolutional blocks. To benchmark the approach, an extensive dataset was gathered from national Finnish road infrastructure network of roadside cameras and optical road surface friction sensors. Acquired results highlight that the proposed WCamNet outperforms previous approaches in the task of predicting the road surface friction from the roadside camera images.
TADAP: Trajectory-Aided Drivable area Auto-labeling with Pre-trained self-supervised features in winter driving conditions
Dec 20, 2023Detection of the drivable area in all conditions is crucial for autonomous driving and advanced driver assistance systems. However, the amount of labeled data in adverse driving conditions is limited, especially in winter, and supervised methods generalize poorly to conditions outside the training distribution. For easy adaption to all conditions, the need for human annotation should be removed from the learning process. In this paper, Trajectory-Aided Drivable area Auto-labeling with Pre-trained self-supervised features (TADAP) is presented for automated annotation of the drivable area in winter driving conditions. A sample of the drivable area is extracted based on the trajectory estimate from the global navigation satellite system. Similarity with the sample area is determined based on pre-trained self-supervised visual features. Image areas similar to the sample area are considered to be drivable. These TADAP labels were evaluated with a novel winter-driving dataset, collected in varying driving scenes. A prediction model trained with the TADAP labels achieved a +9.6 improvement in intersection over union compared to the previous state-of-the-art of self-supervised drivable area detection.
No GPU? No problem: an ultra fast 3D detection of road users with a simple proposal generator and energy-based out-of-distribution PointNets
Jun 06, 2022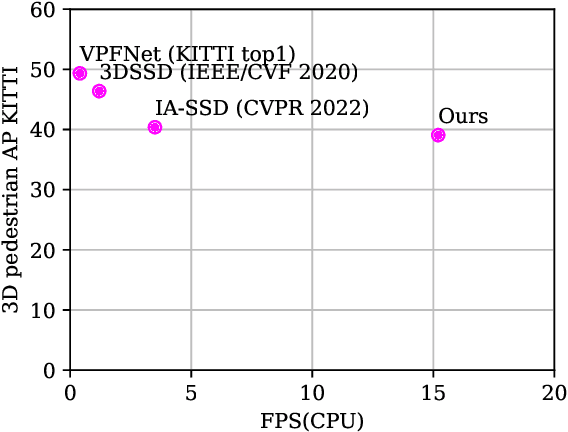
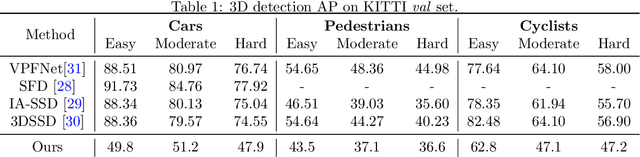
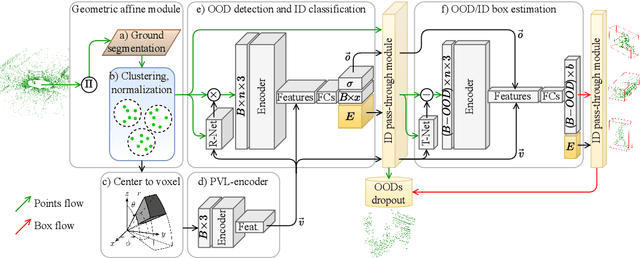
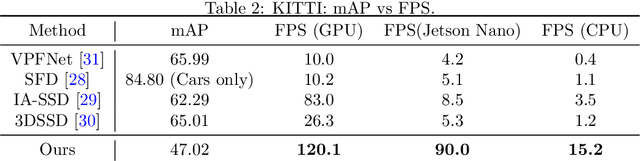
This paper presents a novel architecture for point cloud road user detection, which is based on a classical point cloud proposal generator approach, that utilizes simple geometrical rules. New methods are coupled with this technique to achieve extremely small computational requirement, and mAP that is comparable to the state-of-the-art. The idea is to specifically exploit geometrical rules in hopes of faster performance. The typical downsides of this approach, e.g. global context loss, are tackled in this paper, and solutions are presented. This approach allows real-time performance on a single core CPU, which is not the case with end-to-end solutions presented in the state-of-the-art. We have evaluated the performance of the method with the public KITTI dataset, and with our own annotated dataset collected with a small mobile robot platform. Moreover, we also present a novel ground segmentation method, which is evaluated with the public SemanticKITTI dataset.