 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTADAP: Trajectory-Aided Drivable area Auto-labeling with Pre-trained self-supervised features in winter driving conditions
Dec 20, 2023Detection of the drivable area in all conditions is crucial for autonomous driving and advanced driver assistance systems. However, the amount of labeled data in adverse driving conditions is limited, especially in winter, and supervised methods generalize poorly to conditions outside the training distribution. For easy adaption to all conditions, the need for human annotation should be removed from the learning process. In this paper, Trajectory-Aided Drivable area Auto-labeling with Pre-trained self-supervised features (TADAP) is presented for automated annotation of the drivable area in winter driving conditions. A sample of the drivable area is extracted based on the trajectory estimate from the global navigation satellite system. Similarity with the sample area is determined based on pre-trained self-supervised visual features. Image areas similar to the sample area are considered to be drivable. These TADAP labels were evaluated with a novel winter-driving dataset, collected in varying driving scenes. A prediction model trained with the TADAP labels achieved a +9.6 improvement in intersection over union compared to the previous state-of-the-art of self-supervised drivable area detection.
Enhanced Winter Road Surface Condition Monitoring with Computer Vision
Oct 02, 2023Winter conditions pose several challenges for automated driving applications. A key challenge during winter is accurate assessment of road surface condition, as its impact on friction is a critical parameter for safely and reliably controlling a vehicle. This paper proposes a deep learning regression model, SIWNet, capable of estimating road surface friction properties from camera images. SIWNet extends state of the art by including an uncertainty estimation mechanism in the architecture. This is achieved by including an additional head in the network, which estimates a prediction interval. The prediction interval head is trained with a maximum likelihood loss function. The model was trained and tested with the SeeingThroughFog dataset, which features corresponding road friction sensor readings and images from an instrumented vehicle. Acquired results highlight the functionality of the prediction interval estimation of SIWNet, while the network also achieved similar point estimate accuracy as the previous state of the art. Furthermore, the SIWNet architecture is several times more lightweight than the previously applied state-of-the-art model, resulting in more practical and efficient deployment.
Multi-Echo Denoising in Adverse Weather
May 23, 2023Adverse weather can cause noise to light detection and ranging (LiDAR) data. This is a problem since it is used in many outdoor applications, e.g. object detection and mapping. We propose the task of multi-echo denoising, where the goal is to pick the echo that represents the objects of interest and discard other echoes. Thus, the idea is to pick points from alternative echoes that are not available in standard strongest echo point clouds due to the noise. In an intuitive sense, we are trying to see through the adverse weather. To achieve this goal, we propose a novel self-supervised deep learning method and the characteristics similarity regularization method to boost its performance. Based on extensive experiments on a semi-synthetic dataset, our method achieves superior performance compared to the state-of-the-art in self-supervised adverse weather denoising (23% improvement). Moreover, the experiments with a real multi-echo adverse weather dataset prove the efficacy of multi-echo denoising. Our work enables more reliable point cloud acquisition in adverse weather and thus promises safer autonomous driving and driving assistance systems in such conditions. The code is available at https://github.com/alvariseppanen/SMEDNet
4DenoiseNet: Adverse Weather Denoising from Adjacent Point Clouds
Sep 15, 2022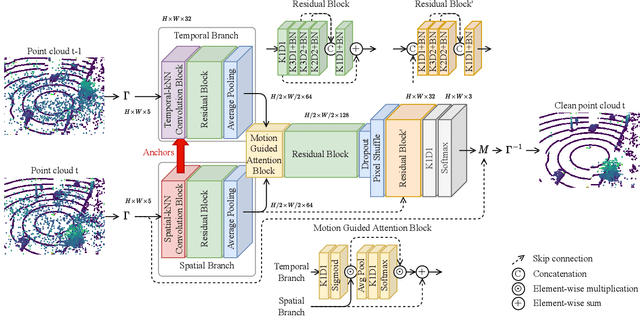
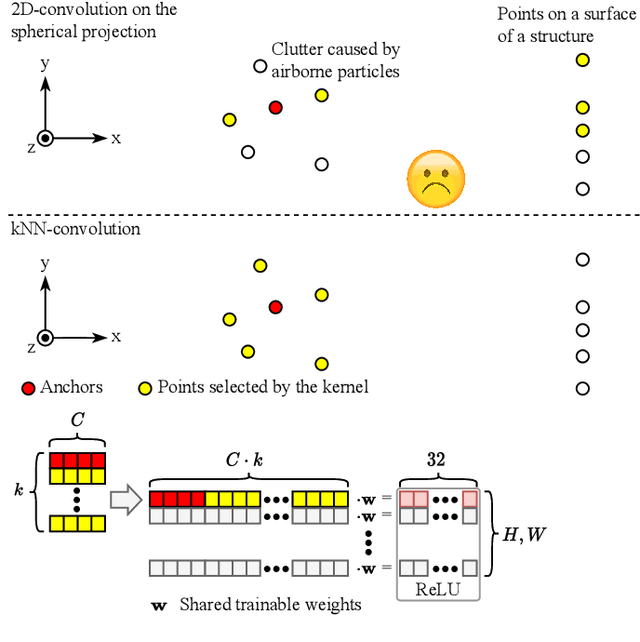
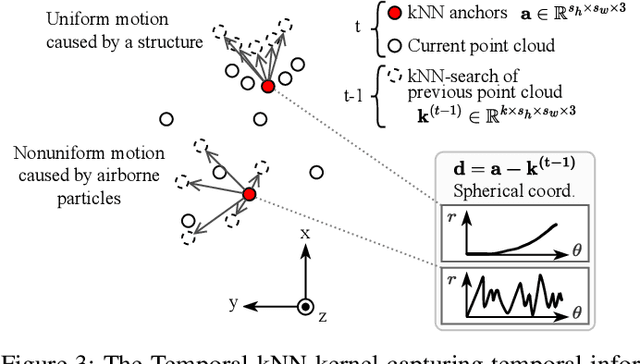
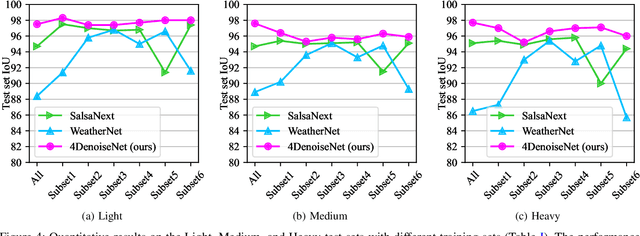
Reliable point cloud data is essential for perception tasks \textit{e.g.} in robotics and autonomous driving applications. Adverse weather causes a specific type of noise to light detection and ranging (LiDAR) sensor data, which degrades the quality of the point clouds significantly. To address this issue, this letter presents a novel point cloud adverse weather denoising deep learning algorithm (4DenoiseNet). Our algorithm takes advantage of the time dimension unlike deep learning adverse weather denoising methods in the literature. It performs about 10\% better in terms of intersection over union metric compared to the previous work and is more computationally efficient. These results are achieved on our novel SnowyKITTI dataset, which has over 40000 adverse weather annotated point clouds. Moreover, strong qualitative results on the Canadian Adverse Driving Conditions dataset indicate good generalizability to domain shifts and to different sensor intrinsics.
No GPU? No problem: an ultra fast 3D detection of road users with a simple proposal generator and energy-based out-of-distribution PointNets
Jun 06, 2022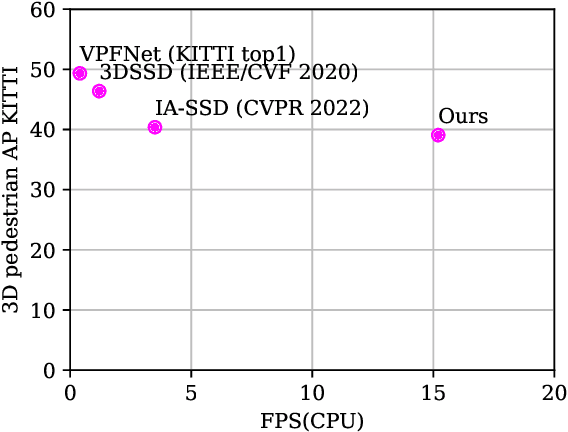
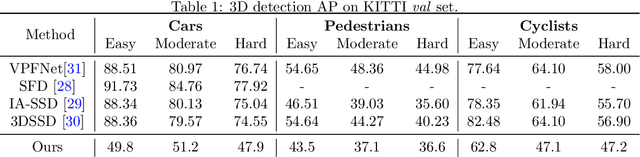
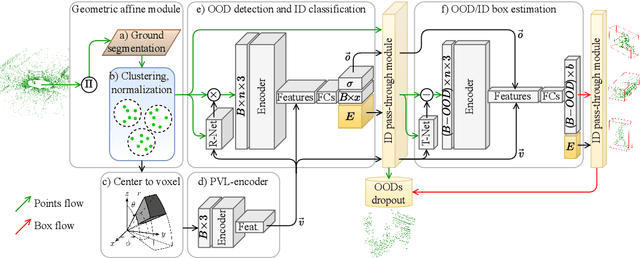
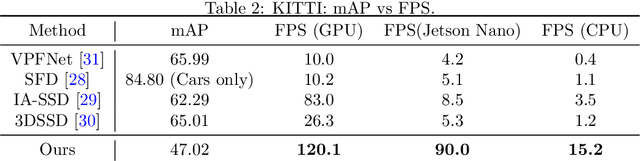
This paper presents a novel architecture for point cloud road user detection, which is based on a classical point cloud proposal generator approach, that utilizes simple geometrical rules. New methods are coupled with this technique to achieve extremely small computational requirement, and mAP that is comparable to the state-of-the-art. The idea is to specifically exploit geometrical rules in hopes of faster performance. The typical downsides of this approach, e.g. global context loss, are tackled in this paper, and solutions are presented. This approach allows real-time performance on a single core CPU, which is not the case with end-to-end solutions presented in the state-of-the-art. We have evaluated the performance of the method with the public KITTI dataset, and with our own annotated dataset collected with a small mobile robot platform. Moreover, we also present a novel ground segmentation method, which is evaluated with the public SemanticKITTI dataset.