 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVBT-MPC: Vision-Based Tactile MPC for Contour Following
May 19, 2026Tactile sensing plays a key role in robotic manipulation, particularly in tasks like surface inspection. Successful execution requires maintaining contact while accurately tracking object contours. In this work, we propose a Vision-Based Tactile Model Predictive Control (VBT-MPC) framework for robotic contour following using a Vision-Based Tactile Sensor (VBTS) mounted in an eye-in-hand configuration. The proposed controller operates directly in contour features space, thereby avoiding the need for separate pose-estimation modules or complex force-control architectures. We further compare our VBT-MPC with visual-servoing strategies adapted to tactile features, and evaluate contour tracking on objects with diverse geometries and materials in both simulation and real-world experiments.
Path Planning With Naive-Valley-Path Obstacle Avoidance and Global Map-Free
Aug 20, 2021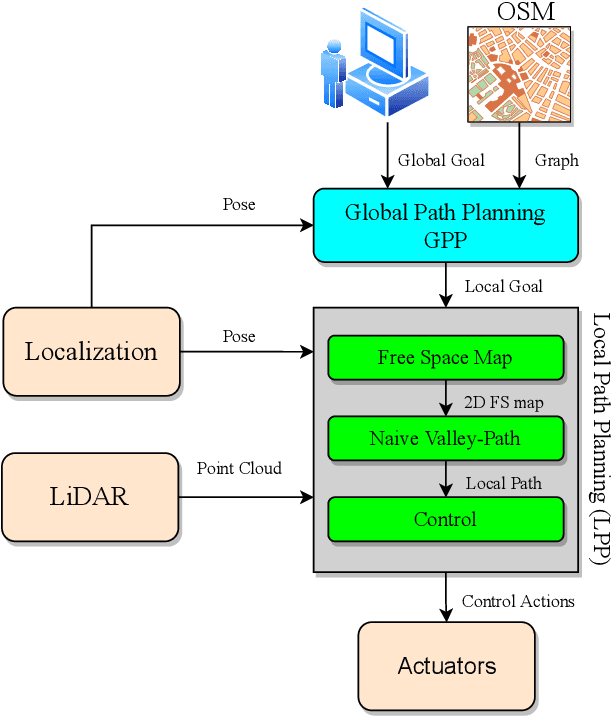
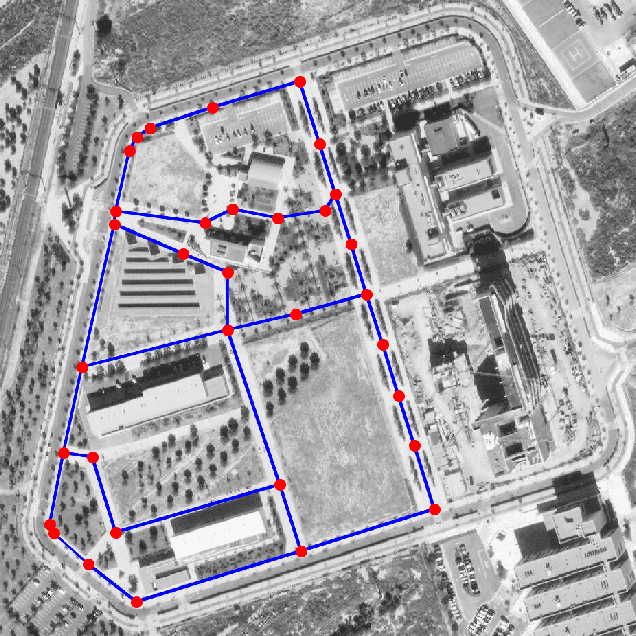
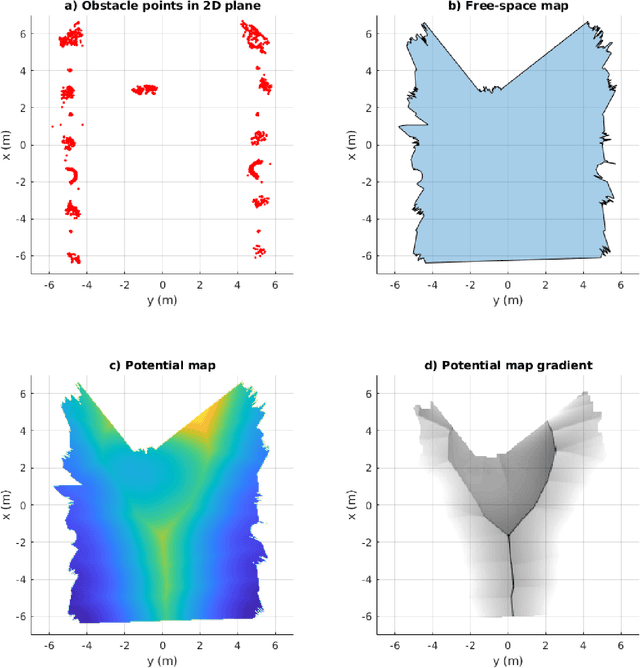
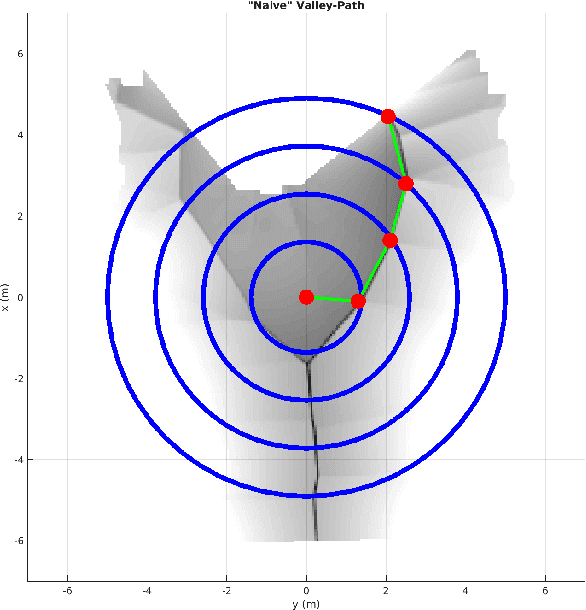
In this paper, we present a complete Path Planning approach divided into two main categories: Global Path Planning (GPP) and Local Path Planning (LPP). Unlike most other works, the GPP layer, instead of complex and heavy maps, uses road and intersections graphs obtained directly from internet applications like OpenStreetMaps (OSM). This map-free GPP frees us from the common area-size restrictions. In the LPP layer, we use a novel Naive-Valley-Path method (NVP) to generate a local path avoiding obstacles in the road in an extremely-low execution time period. This approach exploits the concept of valley areas around local minima, i.e., the ones always away from obstacles. We demonstrate the robustness of the system in our research platform BLUE, driving autonomously across the University of Alicante Scientific Park for more than 20 km in a 12.33 ha area. Our vehicle avoids different static persistent and non-persistent obstacles in the road and even dynamic ones, such as vehicles and pedestrians. Code is available at https://github.com/AUROVA-LAB/lib_planning.