 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRapid and Accurate Diagnosis of Acute Aortic Syndrome using Non-contrast CT: A Large-scale, Retrospective, Multi-center and AI-based Study
Jun 25, 2024



Chest pain symptoms are highly prevalent in emergency departments (EDs), where acute aortic syndrome (AAS) is a catastrophic cardiovascular emergency with a high fatality rate, especially when timely and accurate treatment is not administered. However, current triage practices in the ED can cause up to approximately half of patients with AAS to have an initially missed diagnosis or be misdiagnosed as having other acute chest pain conditions. Subsequently, these AAS patients will undergo clinically inaccurate or suboptimal differential diagnosis. Fortunately, even under these suboptimal protocols, nearly all these patients underwent non-contrast CT covering the aorta anatomy at the early stage of differential diagnosis. In this study, we developed an artificial intelligence model (DeepAAS) using non-contrast CT, which is highly accurate for identifying AAS and provides interpretable results to assist in clinical decision-making. Performance was assessed in two major phases: a multi-center retrospective study (n = 20,750) and an exploration in real-world emergency scenarios (n = 137,525). In the multi-center cohort, DeepAAS achieved a mean area under the receiver operating characteristic curve of 0.958 (95% CI 0.950-0.967). In the real-world cohort, DeepAAS detected 109 AAS patients with misguided initial suspicion, achieving 92.6% (95% CI 76.2%-97.5%) in mean sensitivity and 99.2% (95% CI 99.1%-99.3%) in mean specificity. Our AI model performed well on non-contrast CT at all applicable early stages of differential diagnosis workflows, effectively reduced the overall missed diagnosis and misdiagnosis rate from 48.8% to 4.8% and shortened the diagnosis time for patients with misguided initial suspicion from an average of 681.8 (74-11,820) mins to 68.5 (23-195) mins. DeepAAS could effectively fill the gap in the current clinical workflow without requiring additional tests.
A Tightly Coupled Bi-Level Coordination Framework for CAVs at Road Intersections
Feb 07, 2023



Since the traffic administration at road intersections determines the capacity bottleneck of modern transportation systems, intelligent cooperative coordination for connected autonomous vehicles (CAVs) has shown to be an effective solution. In this paper, we try to formulate a Bi-Level CAV intersection coordination framework, where coordinators from High and Low levels are tightly coupled. In the High-Level coordinator where vehicles from multiple roads are involved, we take various metrics including throughput, safety, fairness and comfort into consideration. Motivated by the time consuming space-time resource allocation framework in [1], we try to give a low complexity solution by transforming the complicated original problem into a sequential linear programming one. Based on the "feasible tunnels" (FT) generated from the High-Level coordinator, we then propose a rapid gradient-based trajectory optimization strategy in the Low-Level planner, to effectively avoid collisions beyond High-level considerations, such as the pedestrian or bicycles. Simulation results and laboratory experiments show that our proposed method outperforms existing strategies. Moreover, the most impressive advantage is that the proposed strategy can plan vehicle trajectory in milliseconds, which is promising in realworld deployments. A detailed description include the coordination framework and experiment demo could be found at the supplement materials, or online at https://youtu.be/MuhjhKfNIOg.
Real-time Cooperative Vehicle Coordination at Unsignalized Road Intersections
May 03, 2022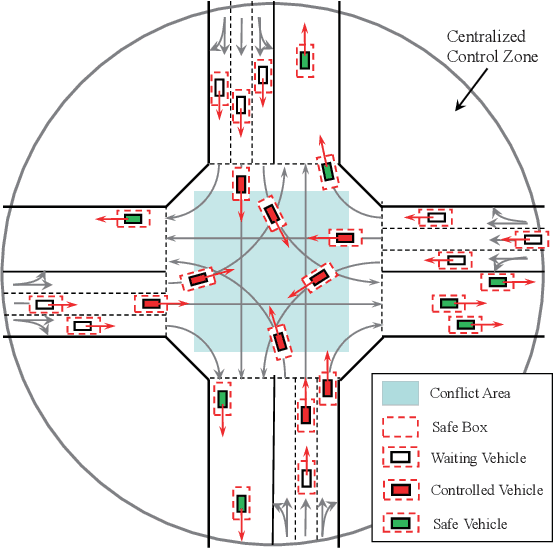
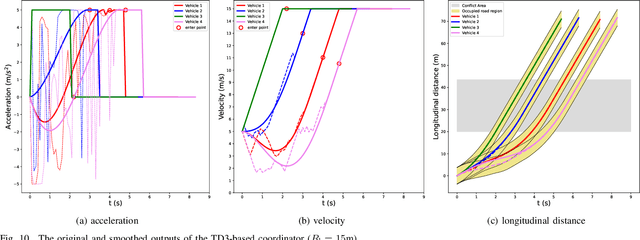
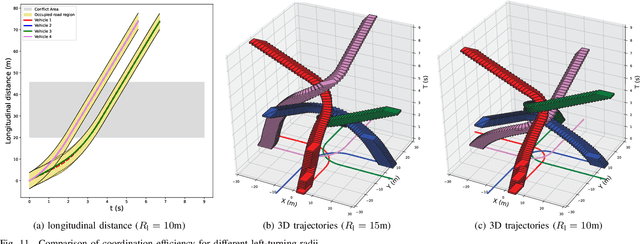
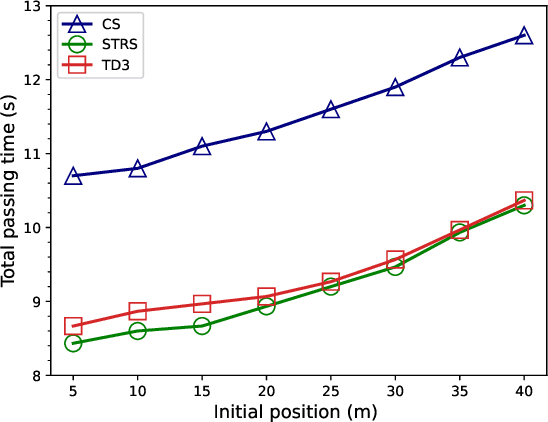
Cooperative coordination at unsignalized road intersections, which aims to improve the driving safety and traffic throughput for connected and automated vehicles, has attracted increasing interests in recent years. However, most existing investigations either suffer from computational complexity or cannot harness the full potential of the road infrastructure. To this end, we first present a dedicated intersection coordination framework, where the involved vehicles hand over their control authorities and follow instructions from a centralized coordinator. Then a unified cooperative trajectory optimization problem will be formulated to maximize the traffic throughput while ensuring the driving safety and long-term stability of the coordination system. To address the key computational challenges in the real-world deployment, we reformulate this non-convex sequential decision problem into a model-free Markov Decision Process (MDP) and tackle it by devising a Twin Delayed Deep Deterministic Policy Gradient (TD3)-based strategy in the deep reinforcement learning (DRL) framework. Simulation and practical experiments show that the proposed strategy could achieve near-optimal performance in sub-static coordination scenarios and significantly improve the traffic throughput in the realistic continuous traffic flow. The most remarkable advantage is that our strategy could reduce the time complexity of computation to milliseconds, and is shown scalable when the road lanes increase.