 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMap as The Hidden Sensor: Fast Odometry-Based Global Localization
Sep 20, 2019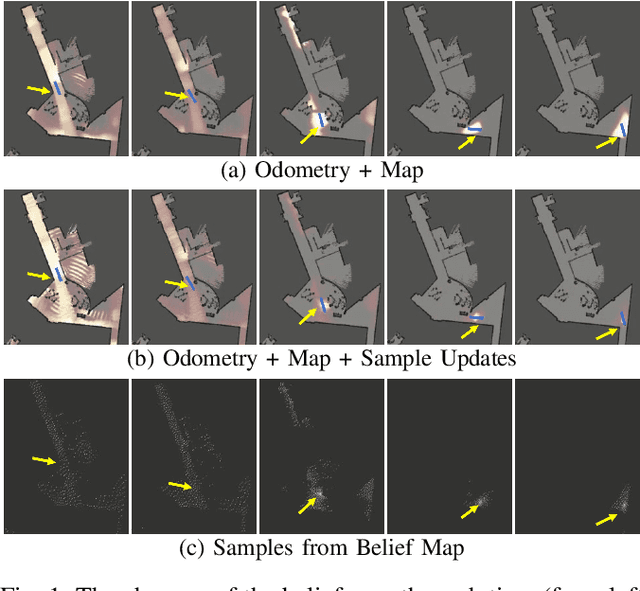
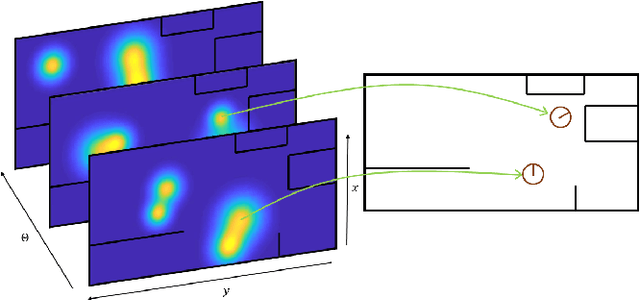
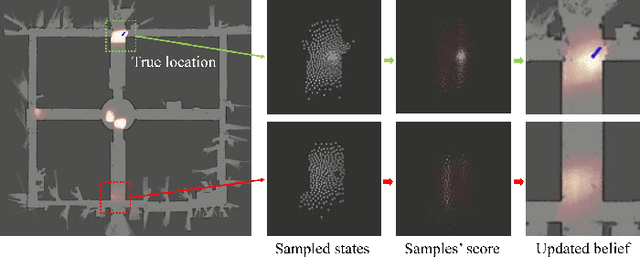
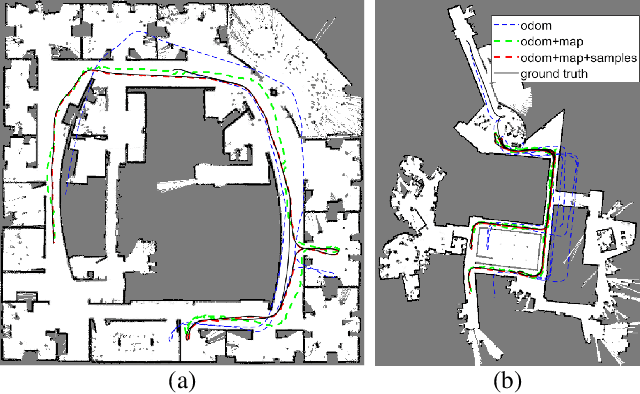
Accurate and robust global localization is essential to robotics applications. We propose a novel global localization method that employs the map traversability as a hidden observation. The resulting map-corrected odometry localization is able to provide an accurate belief tensor of the robot state. Our method can be used for blind robots in dark or highly reflective areas. In contrast to odometry drift in long-term, our method using only odometry and the map converges in longterm. Our method can also be integrated with other sensors to boost the localization performance. The algorithm does not have any initial state assumption and tracks all possible robot states at all times. Therefore, our method is global and is robust in the event of ambiguous observations. We parallel each step of our algorithm such that it can be performed in real-time (up to ~ 300 Hz) using GPU. We validate our algorithm in different publicly available floor-plans and show that it is able to converge to the ground truth fast while being robust to ambiguities.
Optimizing Deep Neural Networks with Multiple Search Neuroevolution
Jan 17, 2019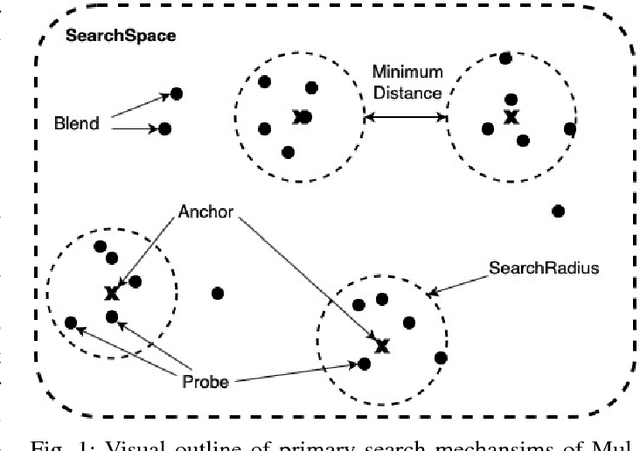
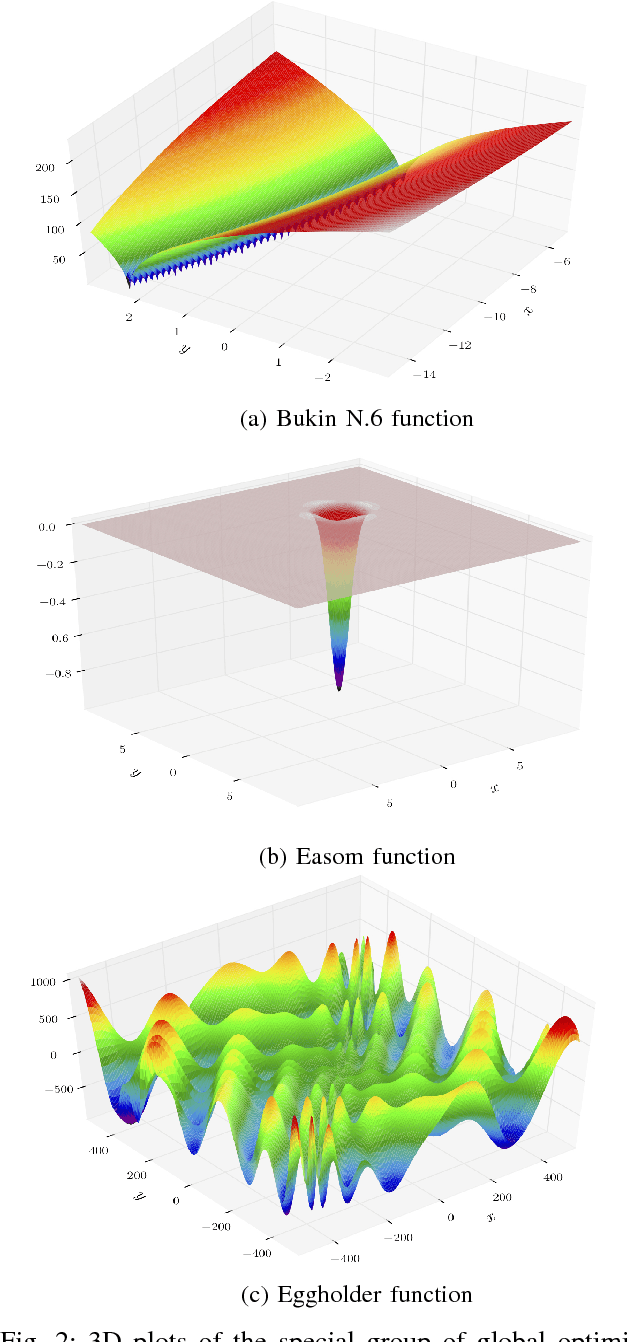
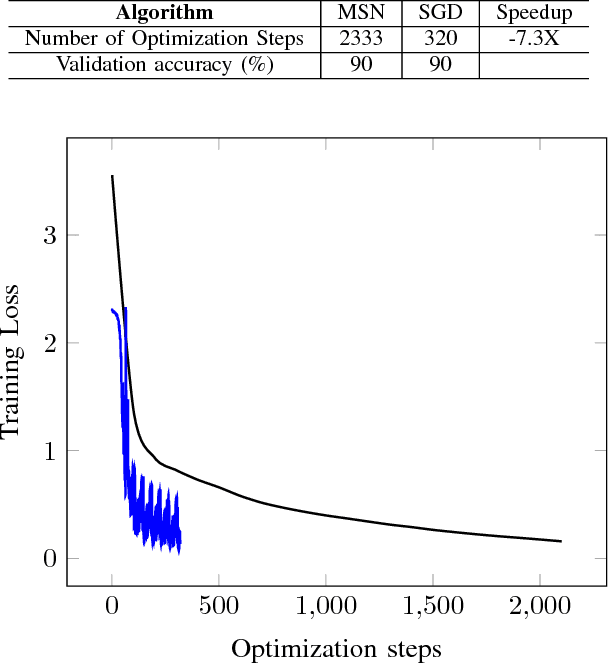
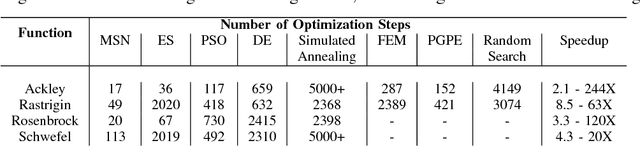
This paper presents an evolutionary metaheuristic called Multiple Search Neuroevolution (MSN) to optimize deep neural networks. The algorithm attempts to search multiple promising regions in the search space simultaneously, maintaining sufficient distance between them. It is tested by training neural networks for two tasks, and compared with other optimization algorithms. The first task is to solve Global Optimization functions with challenging topographies. We found to MSN to outperform classic optimization algorithms such as Evolution Strategies, reducing the number of optimization steps performed by at least 2X. The second task is to train a convolutional neural network (CNN) on the popular MNIST dataset. Using 3.33% of the training set, MSN reaches a validation accuracy of 90%. Stochastic Gradient Descent (SGD) was able to match the same accuracy figure, while taking 7X less optimization steps. Despite lagging, the fact that the MSN metaheurisitc trains a 4.7M-parameter CNN suggests promise for future development. This is by far the largest network ever evolved using a pool of only 50 samples.