 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeByteRover: Agent-Native Memory Through LLM-Curated Hierarchical Context
Apr 02, 2026Memory-Augmented Generation (MAG) extends large language models with external memory to support long-context reasoning, but existing approaches universally treat memory as an external service that agents call into, delegating storage to separate pipelines of chunking, embedding, and graph extraction. This architectural separation means the system that stores knowledge does not understand it, leading to semantic drift between what the agent intended to remember and what the pipeline actually captured, loss of coordination context across agents, and fragile recovery after failures. In this paper, we propose ByteRover, an agent-native memory architecture that inverts the memory pipeline: the same LLM that reasons about a task also curates, structures, and retrieves knowledge. ByteRover represents knowledge in a hierarchical Context Tree, a file-based knowledge graph organized as Domain, Topic, Subtopic, and Entry, where each entry carries explicit relations, provenance, and an Adaptive Knowledge Lifecycle (AKL) with importance scoring, maturity tiers, and recency decay. Retrieval uses a 5-tier progressive strategy that resolves most queries at sub-100 ms latency without LLM calls, escalating to agentic reasoning only for novel questions. Experiments on LoCoMo and LongMemEval demonstrate that ByteRover achieves state-of-the-art accuracy on LoCoMo and competitive results on LongMemEval while requiring zero external infrastructure, no vector database, no graph database, no embedding service, with all knowledge stored as human-readable markdown files on the local filesystem.
Near real-time map building with multi-class image set labelling and classification of road conditions using convolutional neural networks
Jan 27, 2020
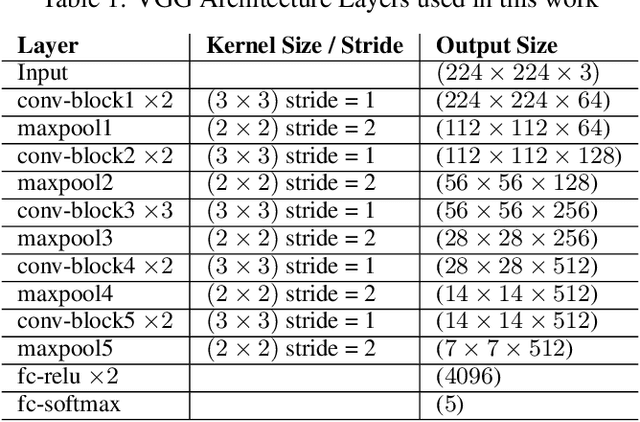
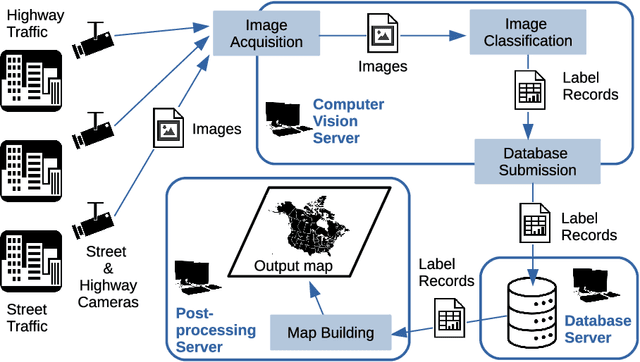
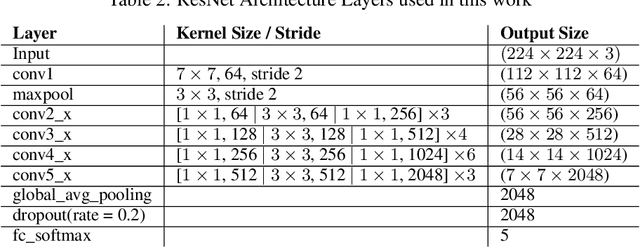
Weather is an important factor affecting transportation and road safety. In this paper, we leverage state-of-the-art convolutional neural networks in labelling images taken by street and highway cameras located across across North America. Road camera snapshots were used in experiments with multiple deep learning frameworks to classify images by road condition. The training data for these experiments used images labelled as dry, wet, snow/ice, poor, and offline. The experiments tested different configurations of six convolutional neural networks (VGG-16, ResNet50, Xception, InceptionResNetV2, EfficientNet-B0 and EfficientNet-B4) to assess their suitability to this problem. The precision, accuracy, and recall were measured for each framework configuration. In addition, the training sets were varied both in overall size and by size of individual classes. The final training set included 47,000 images labelled using the five aforementioned classes. The EfficientNet-B4 framework was found to be most suitable to this problem, achieving validation accuracy of 90.6%, although EfficientNet-B0 achieved an accuracy of 90.3% with half the execution time. It was observed that VGG-16 with transfer learning proved to be very useful for data acquisition and pseudo-labelling with limited hardware resources, throughout this project. The EfficientNet-B4 framework was then placed into a real-time production environment, where images could be classified in real-time on an ongoing basis. The classified images were then used to construct a map showing real-time road conditions at various camera locations across North America. The choice of these frameworks and our analysis take into account unique requirements of real-time map building functions. A detailed analysis of the process of semi-automated dataset labelling using these frameworks is also presented in this paper.